







Новосибирский Государственный Технический Университет
Кафедра электропривода и автоматизации промышленных установок
Расчетно-графическое задание
По дисциплине “Электрический привод”
Факультет: Электромеханический
Группа: Эм-51
Студент: Пашкевич Антон
Преподаватель: Абакумов И.Д.
Вариант: 48
Новосибирск, 2008
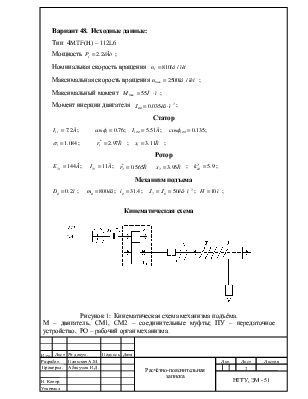
Вариант 48. Исходные данные:
Тип 4MTF(H) – 112L6
Мощность ![]() ;
;
Номинальная скорость
вращения ![]()
Максимальная скорость вращения
![]() ;
;
Максимальный момент ![]() ;
;
Момент инерции двигателя
![]() ;
;
Статор
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
;
Ротор
![]() ;
; ![]() ;
; ![]()
![]() ;
; ![]() ;
;
Механизм подъема
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
Кинематическая схема
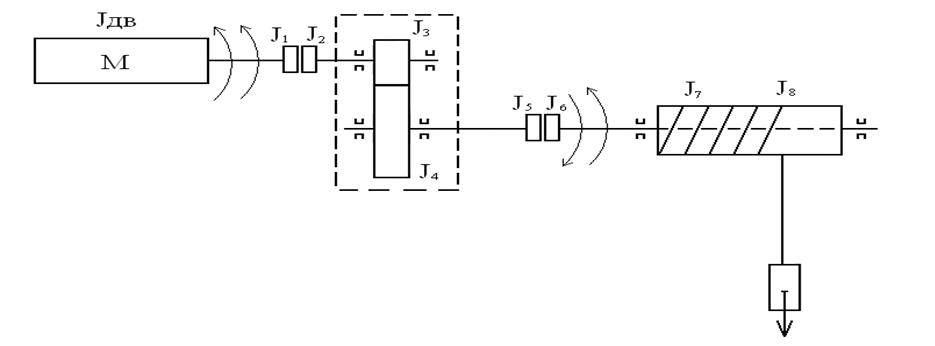
Рисунок 1: Кинематическая схема механизма подъёма.
М – двигатель, СМ1, СМ2 – соединительные муфты; ПУ – передаточное устройство, РО – рабочий орган механизма.
Задача 1:
1. Привести моменты
инерции движущихся инерционных масс привода к скорости вращения
электродвигателя. Определить суммарный момент инерции расчетной эквивалентной
механической схемы привода. При этом принять суммарный момент инерции
соединительных муфт и шестерни редуктора, вращающихся со скоростью двигателя ![]() , равным
, равным ![]() ,а суммарный момент инерции соединительных муфт и шестерни
редуктора, вращающихся со скоростью механизма
,а суммарный момент инерции соединительных муфт и шестерни
редуктора, вращающихся со скоростью механизма ![]() , равным
, равным ![]() .
.
Эквивалентный момент инерции двигателя:
![]() .
.
Эквивалентный момент инерции барабана:
![]() .
.
Приведение поступательно движущейся массы груза к моменту инерции барабана:
 – кинетическая энергия
поступательного движения груза;
– кинетическая энергия
поступательного движения груза;
 – кинетическая энергия
вращательного движения барабана;
– кинетическая энергия
вращательного движения барабана;
На основе равенства запасов кинетической энергии в реальной кинематической схеме и эквивалентной расчетной.
![]() ;
;  ;
;
 – скорость
поступательного движения груза.
– скорость
поступательного движения груза.
Отсюда выразим приведенный момент инерции барабана:
 .
.
Тогда можно найти суммарный момент инерции на валу двигателя:
 .
.
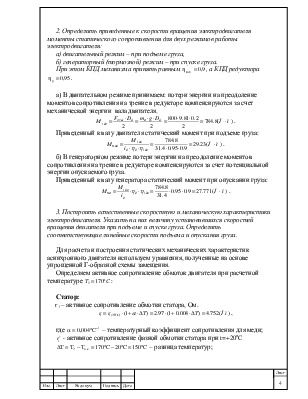
2. Определить приведенные к скорости вращения электродвигателя моменты статического сопротивления для двух режимов работы электродвигателя:
а) двигательный режим – при подъеме груза,
б) генераторный (тормозной) режим – при спуске груза.
При этом КПД механизма принять равным ![]() , а КПД редуктора
, а КПД редуктора ![]() .
.
а) В двигательном режиме принимаем: потери энергии на преодоление моментов сопротивления на трение в редукторе компенсируются за счет механической энергии вала двигателя.
 .
.
Приведенный к валу двигателя статический момент при подъеме груза:
 .
.
б) В генераторном режиме потери энергии на преодоление моментов сопротивления на трение в редукторе компенсируются за счет потенциальной энергии опускаемого груза.
Приведенный к валу генератора статический момент при опускании груза:
 .
.
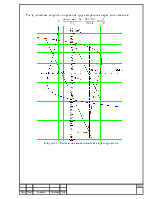
3. Построить естественные скоростную и механическую характеристики электродвигателя. Указать на них величину установившихся скоростей вращения двигателя при подъеме и спуске груза. Определить соответствующие линейные скорости подъема и опускания груза.
Для расчета и построения статических механических характеристик асинхронного двигателя используем уравнения, полученные на основе упрощенной Г-образной схемы замещения.
Определяем активное сопротивление обмоток двигателя
при расчетной температуре ![]() :
:
Статор:
r1 – активное сопротивление обмотки статора, Ом.
![]() ,
,
где ![]() – температурный
коэффициент сопротивления для меди;
– температурный
коэффициент сопротивления для меди;
![]() - активное
сопротивление фазной обмотки статора при t=+20oC
- активное
сопротивление фазной обмотки статора при t=+20oC
![]() – разница температур;
– разница температур;
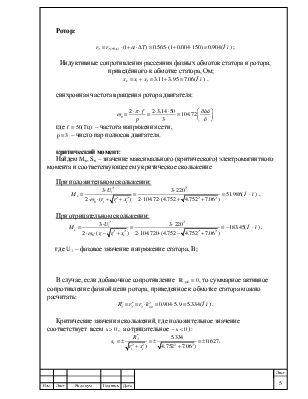
Ротор:
![]() ;
;
Индуктивные сопротивления рассеяния фазных обмоток статора и ротора, приведённого к обмотке статора, Ом;
![]() .
.
синхронная частота вращения ротора двигателя:

где ![]() – частота напряжения
сети,
– частота напряжения
сети,
![]() – число пар полюсов
двигателя.
– число пар полюсов
двигателя.
критический момент:
НайдемMк, Sк – значение максимального (критического) электромагнитного момента и соответствующее ему критическое скольжение
При положительном скольжении:
 ,
,
При отрицательном скольжении:
 .
.
где U1 – фазовое значение напряжение статора, В;
В случае, если добавочное сопротивление ![]() , то суммарное активное сопротивление
фазной цепи ротора, приведенное к обмотке статора можно расчитать:
, то суммарное активное сопротивление
фазной цепи ротора, приведенное к обмотке статора можно расчитать:
![]() .
.
Критические значения скольжений, где положительное
значение соответствует всем ![]() , а отрицательное –
, а отрицательное – ![]() ):
):
 .
.
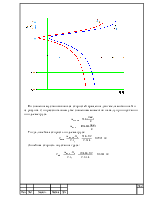
Механическая характеристика:
Для построении механической характеристики зададимся
текущими значениями скольжения S в
пределах S1=-0,5 до Sn=2. Рассчитываем значения текущего электромагнитного момента и условной
скорости вращения ротора ![]() . Причём для отрицательных скольжений (Si<0)
в уравнениях для Mk и Sk принимается знак минус
. Причём для отрицательных скольжений (Si<0)
в уравнениях для Mk и Sk принимается знак минус
Проведем
расчет для скольжения ![]() :
:
Момент:  ,
,
где  .
.
Угловая частота вращения для
![]() :
:  .
.
Далее, задаваясь скольжением, с шагом 0.1 продолжаем
расчеты в системе Mathcad до ![]() . По полученным данным строим зависимости.
. По полученным данным строим зависимости.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.