Таблица 1 – Характеристика холостого хода
По полученным данным строим характеристику Холостого Хода:
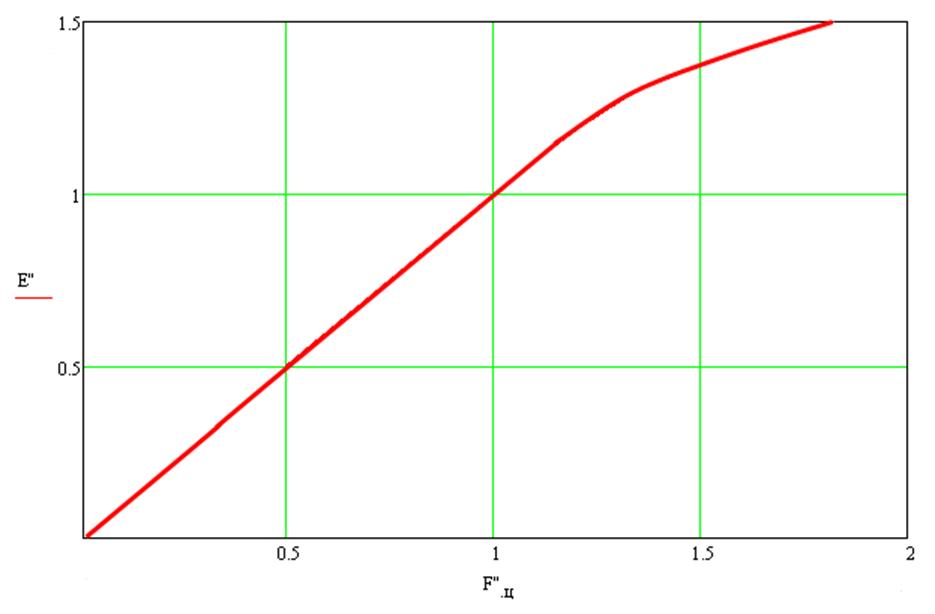
Рисунок 1 – Характеристика холостого хода
Расчет параметров обмотки статора:
79. Длина лобовой части обмотки статора:
![]()
где  - средняя ширина паза
статора.
- средняя ширина паза
статора.
lпр =0.005(м)– длина прямолинейной части катушки при выходе из паза.
80. Длина вылета лобовой части катушки из паза:

81. Длина витка обмотки статора:
![]()
82. Полная длина проводников фазы обмотки статора:
![]()
83. Активное сопротивление фазы обмотки статора при t=20 С:

При расчетной температуре в 115 градусов::
![]()
84. Коэффициент магнитной проводимости пазового рассеяния:

85. Коэффициент магнитной проводимости лобового рассеяния:
 .
.
86. Суммарный коэффициент проводимости рассеяния:
![]()
87. Индуктивное сопротивление рассеяния фазы обмотки статора:

88. Проводимость воздушного зазора:

89. Проводимость магнита:

90. Индуктивное сопротивление воздушного зазора:

91. Индуктивное сопротивление магнита:

92. Индуктивное сопротивлении рассеяния полюса магнита:

93. Индуктивное сопротивление обмотки статора по продольной оси:

94. Индуктивное сопротивление обмотки статора по поперечной оси:
 ,
,
где
 - проводимость воздушного зазора
по поперечной оси.
- проводимость воздушного зазора
по поперечной оси.
95. Индуктивное сопротивление по поперечной оси:
![]()
6. Диаграмма магнита. Проверка рабочей точки.
Для рассматриваемых типов машин используют постоянные магниты с прямолинейной характеристикой размагничивания. Диаграмму магнита и все характеристики строят в относительных значениях, принимая за базисные, значения остаточной индукции Br и теоретической коэрцитивной силы Hc.

Диаграмма магнита представлена на рисунке 2.
Таблица №2. Расчетные данные для построения диаграммы магнита.
|
|
0,219 |
0,438 |
0,482 |
0,525 |
0,569 |
0,613 |
|
|
0.099 |
0.199 |
0.22 |
0.243 |
0.269 |
0.31 |
|
|
0.055 |
0.111 |
0.123 |
0.136 |
0.151 |
0175 |
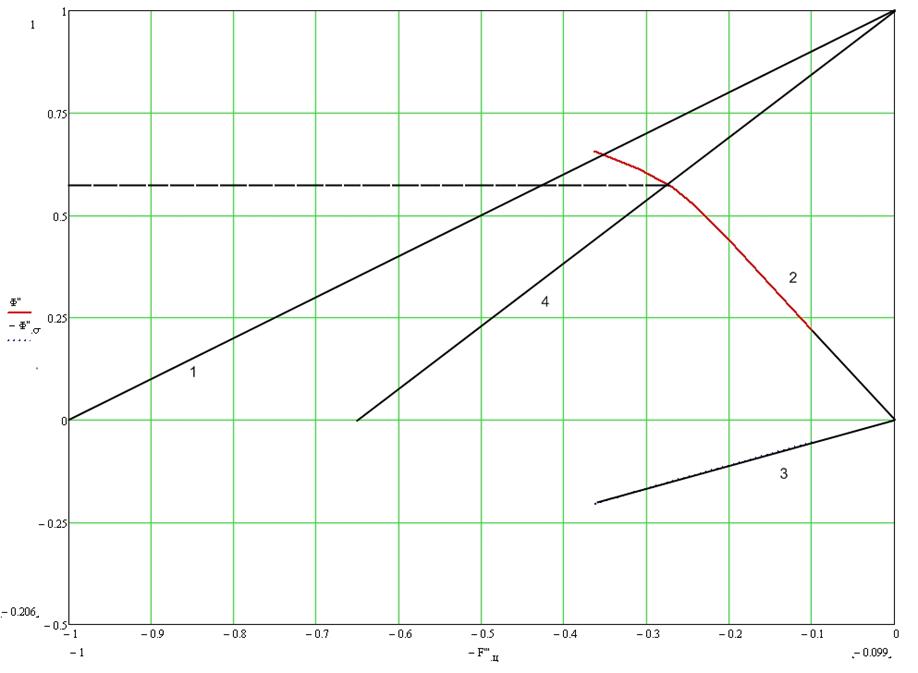
Рисунок 21. Диаграмма магнита.
1 – характеристика размагничивания магнита;
2 – Ф*=f(Fц*) характеристика холостого хода;
3 – Фσ*=f(Fц*) зависимость потока рассеяния от намагничивающей силы;
4 – находится как разность характеристик 1 и 3, и представляет зависимость магнитного потока, обеспечиваемого магнитами в воздушном зазоре.
Точка пересечения характеристик 2 и 4 определяет индукцию магнита B`M0 в режиме х. х.
96. Магнитный поток в воздушном зазоре при ХХ
![]()
97. Индукция в воздушном зазоре при ХХ

98. Определение действительной ЭДС, соответствующей рабочей точке магнита:
![]()
99. Активная составляющая сопротивления нагрузки в номинальном режиме:

100. Индуктивная составляющая сопротивления нагрузки в номинальном режиме:

101. Требуемая ЭДС холостого хода:
 , где
, где
![]()
![]()
![]()
Действительная ЭДС отличается от требуемой на 5.5%, что допустимо.
Масса активных материалов:
Масса меди обмотки статора:
![]()
Масса ярма статора:
![]()
Масса зубцов статора:
![]()
Масса магнитов:
![]()
Масса полюсов:

8. Потери и коэффициент полезного действия.
Электрические потери в обмотке статора:
![]()
Магнитные потери в зубцах статора:

Магнитные потери в ярме сердечника статора:

Добавочные потери при нагрузке:
![]()
Потери в подшипниках:
![]() ,
,
где
Масса ротора:

Потери вращающихся частей о воздух:
![]()
Суммарные механические потери:
![]()
Полные потери в электрической машине:
![]()
Коэффициент полезного действия:
 .
.
Новосибирский Государственный Технический Университет

Кафедра электромеханики
Факультет: ФМА
Группа: ЭМ – 51
Студент: Пашкевич А.М.
Преподаватель: Тюков В. А.
Новосибирск, 2009 г.
Список литературы:
1. «Многополюсные синхронные машины, часть 2», методические указания по курсовому и дипломному проектированию для студентов 4-5 курсов, составители Ю. Г. Бухгольц, А. В. Комаров и др., НГТУ,1996г.
2. « Многополюсные синхронные машины с дробными однозубцовыми обмотками, часть 1», методические указания по курсовому и дипломному проектированию для студентов специальности 1801, составители Ю. Г. Бухгольц, А. В. Комаров и др., НГТУ,1996г.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.