где ![]() - толщина щёчек, при проектировании можно
принять: при каркасной намотке
- толщина щёчек, при проектировании можно
принять: при каркасной намотке  ;
;
Принимаем ![]() =
= ![]() ,
,
Тогда
 ;
;
 ;
;
4.3.2. Размеры характеризующие пространство, занятое проводниками в поперечном сечении электромагнита:
· внутренние размеры каркасной катушки прямоугольной формы:
 ;
;
4.4. Разработка эскиза электромагнита :
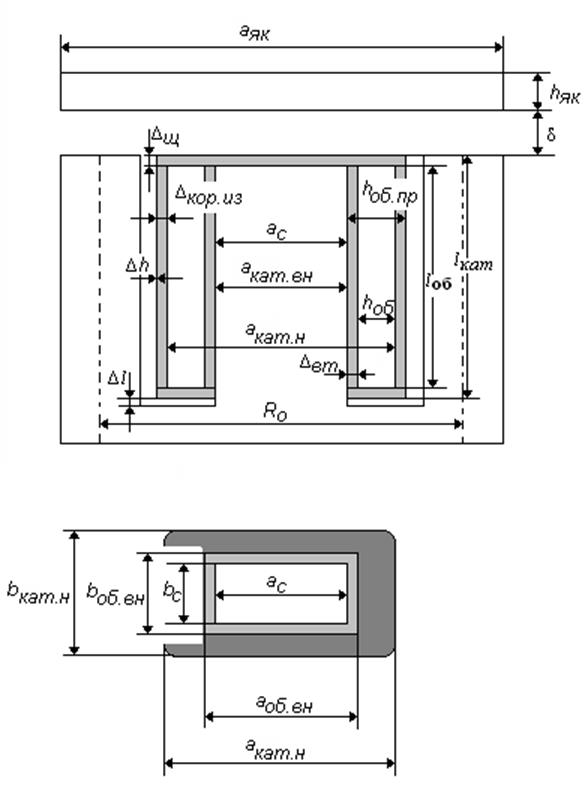
Рис.2. Эскиз электромагнита Ш-образной формы переменного тока.
5. ОПРЕДЕЛЕНИЕ И ПРИВИДЕНИЕ ДЕЙСТВУЮЩИХ СИЛ
5.1. Действующие силы – движущие и противодействующие
Движение механизма аппарата может рассматриваться как движение по определенной траектории материальной точки, к которой приводятся все действующие силы как движущие, так и силы сопротивления движению. Наглядное и точное представление о передаче и преобразовании движения звеньями механизма дает кинематическая схема.
Кинематическая схема строится для наиболее характерных положений цикла движения механизма, в том числе для двух крайних – включенного и отключенного положений аппарата.
С учетом вышесказанного строится кинематическая схема аппарата (Рис.2)
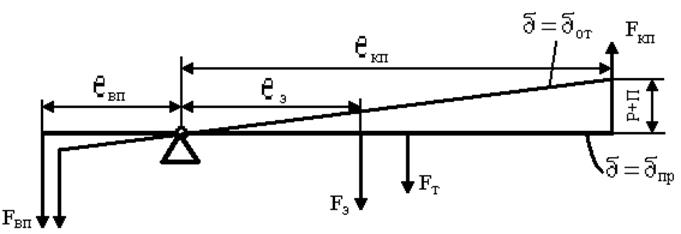
Рис.3 Кинематическая схема.
Р,
П – раствор и провал контактов;![]() - воздушный рабочий
зазор электромагнита;
- воздушный рабочий
зазор электромагнита;![]() ,
, ![]() ,
, ![]() ,
, ![]() - сила
контактной и возвратной пружины, электромагнита и силы тяжести подвижных
частей.
- сила
контактной и возвратной пружины, электромагнита и силы тяжести подвижных
частей.
5.2. Расчёт пружин
Цилиндрические винтовые пружины, витые из стальной углеродистой проволоки или прутка, в зависимости от их размеров могут развивать усилия, измеряемые от граммов до тонн, широко применяются в больших и малых аппаратах.
На основании
теории деформации винтовой пружины, навитой из проволоки или прутка круглого
сечения ( предел выносливости углеродистой пружинной проволоки  ) и воспринимающей осевую сжимающую или
растягивающую нагрузку, производится расчёт следующих величин.
) и воспринимающей осевую сжимающую или
растягивающую нагрузку, производится расчёт следующих величин.
5.2.1. Допускаемое напряжение на скручивание:
 , (5.1)
, (5.1)
где ![]() - осевая сжимающая или растягивающая
сила, которую должна развивать пружина.
- осевая сжимающая или растягивающая
сила, которую должна развивать пружина.
![]() ,
,
с – индекс
пружины, характеризует кривизну витка, определяющую концентрацию напряжений в
материале изменяется в пределах ![]() , принимаем
, принимаем ![]()
![]() - диаметр проволоки пружины:
- диаметр проволоки пружины:
 (5.2)
(5.2)
 ;
;
Тогда  ;
;
прогиб пружины
 , (5.3)
, (5.3)
где ![]() - модуль упругости сдвига при кручении; у
углеродистой пружинной проволоки
- модуль упругости сдвига при кручении; у
углеродистой пружинной проволоки ![]() ;
;
![]() число рабочих витков пружины (при поджатых
подшлифованных витках пружины сжатия полное дополнительное число витков
принимается равным
число рабочих витков пружины (при поджатых
подшлифованных витках пружины сжатия полное дополнительное число витков
принимается равным ![]() )
)
На данном этапе расчета число витков пружины можно определить как:
 витка;
витка;
Тогда ![]() витка;
витка;
В итоге  ;
;
5.2.2. Число витков пружины:
 витка;
витка;
5.2.3. Шаг пружины растяжения и сжатия:
 ;
;
 ;
;
5.2.4. Свободная длина пружины растяжения и сжатия:
 ;
;
![]() ;
;
6. ПОВЕРОЧНЫЙ РАСЧЁТ ЭЛЕКТРОМАГНИТА ПЕРЕМЕННОГО ТОКА.
6.1. Составление схемы замещения (Рис.3):
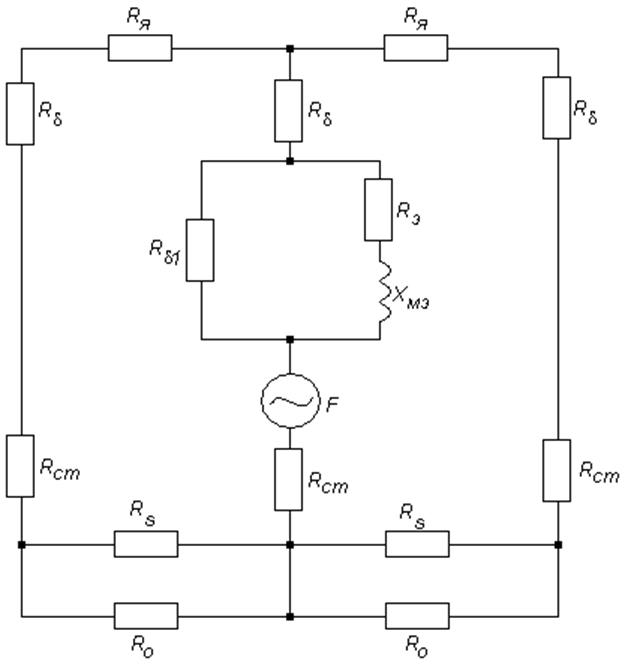
Рис. 4. Схема
замещения электромагнита переменного тока Ш-образной формы.
6.2. Определение магнитных проводимостей участков цепи:
6.2.1. Магнитные проводимости воздушных зазоров и промежутков – путей потоков рассеяния:
![]() , (6.1)
, (6.1)
здесь ![]() - магнитная проводимость воздушных зазоров
и промежутков параллельных
- магнитная проводимость воздушных зазоров
и промежутков параллельных
плоскостей ( без учета краевого потока);
![]() - магнитная проводимость воздушных зазоров
и промежутков;
- магнитная проводимость воздушных зазоров
и промежутков;
![]() - магнитная проводимость воздушных зазоров
и промежутков;
- магнитная проводимость воздушных зазоров
и промежутков;
 ;
;
 ;
;
 ,
,
где ![]() ,
,
Тогда  ;
;
 ;
;
6.2.2. Удельная магнитная проводимость рассеяния при распределенной по сердечнику намагничивающей силы, отнесенная к единице длины участка:
 ; (6.2)
; (6.2)
6.2.3. Расчет магнитной проводимости рабочих воздушных зазоров и первая производная этой проводимости:
 , (6.3)
, (6.3)
здесь  ;
;
 ,
,
где ![]() ;
;
![]() ;
;
Тогда  ;
;
 ;
;

Производная проводимости:
 ;
;
6.3. Определение коэффициента рассеяния при отпущенном якоре без учета сопротивления экрана:
6.3.1. Коэффициент рассеяния:
При ![]() при притянутом якоре обычно
при притянутом якоре обычно ![]()
6.3.2. Коэффициент рассеяния :
При ![]() при отпущенном якоре
при отпущенном якоре
 , (6.4)
, (6.4)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.