
Индуктивное сопротивление рассеяния полюса (магнита):

Индуктивное сопротивление обмотки статора по продольной оси:

Индуктивное сопротивление обмотки статора по поперечной оси:
![]()
где

где

9. Диаграмма магнита. Проверка рабочей точки
По результатам таблицы 2 строим диаграмму магнита, показанную на рисунке 6, и определяем рабочую точку. Магниты типа неодим-железо-бор имеют прямолинейную характеристику размагничивания. Диаграмма магнита и все характеристики строятся в относительных единицах. За базисные единицы приняты значения остаточной индукции и коэрцитивной силы. Соответственно базисные значения магнитного потока и намагничивающей силы определяются через них.
![]()
![]()
Порядок построения диаграммы магнита следующий:
а) строится характеристика размагничивания магнита 1;
б) по данным таблицы 3 строится характеристика холостого хода 2
![]()
и зависимость потока рассеяния от намагничивающей силы 3
![]()
в) кривая 4, определяемая как разность характеристик 1 и 3, представляет собой зависимость магнитного потока, обеспечиваемого магнитами в воздушном зазоре от намагничивающей силы.
Данные для построения диаграммы магнита приведены в таблице 3.
Таблица 3 Данные для построения диаграммы магнита
|
|
0.232 |
0.465 |
0.511 |
0.577 |
0.604 |
0.650 |
0.697 |
|
|
0.055 |
0.110 |
0.122 |
0.134 |
0.149 |
0.173 |
0.206 |
|
|
0.105 |
0.212 |
0.235 |
0.258 |
0.286 |
0.331 |
0.391 |
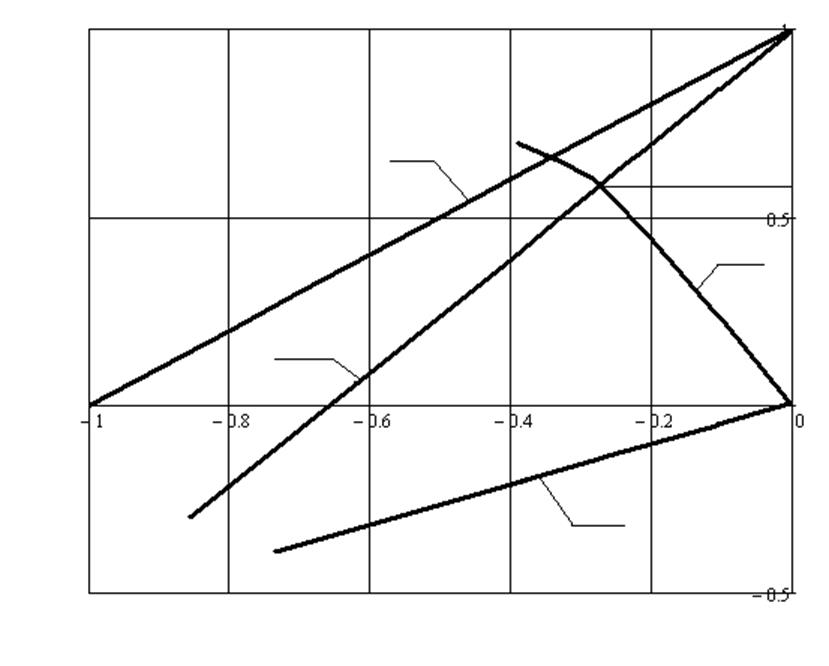
Рисунок 6 Диаграмма магнита
Магнитный поток в воздушном зазоре при холостом ходе:
![]()
Индукция в воздушном зазоре при холостом ходе:

Действительная ЭДС соответствующая рабочей точке магнита:

10. Параметры схемы замещения при нагрузке
Активная составляющая сопротивления нагрузки в номинальном режиме:

Индуктивная составляющая сопротивления нагрузки в номинальном режиме:

Требуемая ЭДС холостого хода:

где
![]()
![]()
![]()
Проверка:

Проверка выполняется.
11. Масса активных материалов
Масса зубцов статора:

где ![]() – удельная плотность стали.
– удельная плотность стали.
Масса ярма статора:

Масса меди обмотки статора:

Масса магнитов:
![]()
где ![]() – удельная плотность материала
магнита,
– удельная плотность материала
магнита, ![]()
Масса стали полюсов:

12. Расчёт потерь и КПД
Основные электрические потери в обмотке статора:
![]()
Магнитные потери в зубцах статора:

где ![]() – коэффициент учитывающий
увеличение потерь в зубцах из-за частичного замыкания листов вследствие наличия
заусенцев, а также изменения структуры стали,
– коэффициент учитывающий
увеличение потерь в зубцах из-за частичного замыкания листов вследствие наличия
заусенцев, а также изменения структуры стали, ![]()
![]() – удельные потери в стали при
индукции 1 Тл и частоте 50 Гц,
– удельные потери в стали при
индукции 1 Тл и частоте 50 Гц, 
Магнитные потери в ярме сердечника статора:

где ![]() − коэффициент учитывающий
увеличение потерь в ярме статора из-за частичного замыкания листов вследствие
наличия заусенцев, а также изменения структуры стали,
− коэффициент учитывающий
увеличение потерь в ярме статора из-за частичного замыкания листов вследствие
наличия заусенцев, а также изменения структуры стали, ![]()
Потери в подшипниках:
![]()
где ![]() – масса ротора с учётом вала. Она
может быть приближённо определена по формуле:
– масса ротора с учётом вала. Она
может быть приближённо определена по формуле:

Потери на трение вращающихся частей о воздух:
![]()
Суммарные механические потери:
![]()
Добавочные потери при нагрузке:
![]()
Полные потери в машине:

Коэффициент полезного действия:

Полученное значение КПД превышает установленное техническим заданием, что подтверждает рациональность спроектированного генератора.
Список использованной литературы:
1 Многополюсные синхронные машины. Методические указания, ч.2 – Новосибирск, 1996.
2 Многополюсные синхронные машины. Методические указания, ч.1 – Новосибирск, 1995.
3 Балагуров В.А. Электрические генераторы с постоянными магнитами/ В.А. Балагуров, Ф.Ф. Галтеев. – М.: Энергоатомиздат, 1988. – 280 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.