В зависимости от способа возбуждения различают двигатели: с параллельным, с последовательным и со смешанным возбуждением.
1)Электродвигатели с параллельным возбуждением применяются когда требуется примерно постоянная частота вращения и нет резких изменения момента сопротивления приводного механизма.
Особенность этого электродвигателя заключается в том что ток в обмотке возбуждения не зависит от нагрузки.
2) Электродвигатели с последовательным возбуждением используются когда требуется большой пусковой момент, также для приведения в движение реверсивных механизмов(без постоянства частоты вращения).
Особенности:
- Ток в обмотке возбуждения такой же, как и в обмотке якоря.
- При холостом ходе и малых нагрузках на валу, ток электродвигателя и магнитный поток имеют наибольшее значение, т.е. значительно возрастает частота вращения и электродвигатель может пойти «в разнос» (нарушается механическая прочность вращающихся частей машины).
3) Электродвигатели со смешанным возбуждением используют когда требуется создать большой пусковой момент и ограничить частоту вращения при холостом ходе , также при резких изменениях нагрузки и необходимости сохранения примерно постоянной частоты вращения.
Особенности:
- обладает свойствами соответствующими промежуточному положению между электродвигателями с параллельным и последовательным возбуждением.
- имеет конечную частоту вращения идеального холостого хода.
Рабочие характеристики:
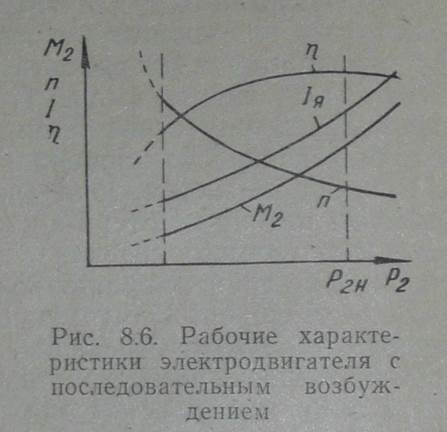
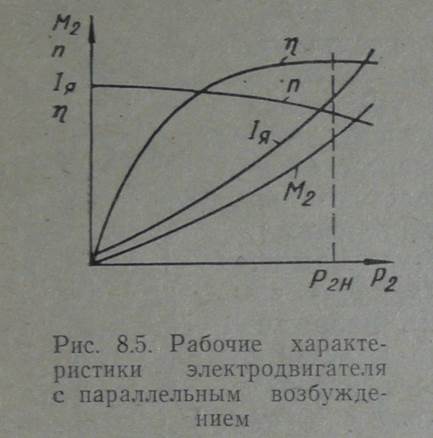
IЯ – ток в якоре
М2 – вращающий момент а валу
n - частота вращения
Р2 – мощность на валу электродвигателя
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

