Министерство образования Российской Федерации
Санкт-Петербургский государственный горный институт им. Г.В. Плеханова
(технический университет)
РАСЧЁТНО-ГРАФИЧЕСКОЕ ЗАДАНИЕ № 2
|
По дисциплине __________________________________________________________
________________________________________________________________________
(наименование учебной дисциплины согласно учебному плану)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
|
|
_____________________________________________________________________________
Автор: студент гр. ММ-01 ____________________ / Сергеева Н А /
(подпись) (Ф.И.О.)
ОЦЕНКА: _____________
Дата: ___________________
ПРОВЕРИЛ
Руководитель проекта гл. преп-ль ________________ /Соколова Г В. /
(должность) (подпись) (Ф.И.О.)
Санкт-Петербург
2002
|
|
m1, кг |
m2, кг |
m3, кг |
r2, см |
R2, см |
r, см |
с, Н/м |
l, см |
h0, см |
h0, см/с |
с1, Н/м |
|
6 |
27 |
6 |
6 |
9 |
8 |
675 |
30 |
0,4 |
1,8 |
50 |
Кинетическая энергия системы, как и в РГР№1, вычисляется по формуле:
Т=Т1+Т2+Т3; (1)
Однако теперь
положение груза 1 определяется новой обобщенной координатой. Поэтому  . Кинетические энергии тел 2,3 вычисляются
по старым формулам:
. Кинетические энергии тел 2,3 вычисляются
по старым формулам:  и
и  .
.
 (2)
(2)
Выражение в скобках обозначим m. Поэтому  , где m=66 кг
, где m=66 кг
К потенциальной энергии, определяемой формулой:  ,
в РГР№1, добавится потенциальная энергия дополнительной пружины. При движении
системы точка А (верхний конец) перемещается на величину h, нижний конец (груз 1) на величину h1. Значит изменение длины пружины
равно разности h1-h, так что дополнительная потенциальная энергия
может быть записана так:
,
в РГР№1, добавится потенциальная энергия дополнительной пружины. При движении
системы точка А (верхний конец) перемещается на величину h, нижний конец (груз 1) на величину h1. Значит изменение длины пружины
равно разности h1-h, так что дополнительная потенциальная энергия
может быть записана так:
Потенциальная энергия всей системы будет иметь вид:
|
|
|
|
|
 +
+ , m=1800 Н/м
, m=1800 Н/м
|
|
 |
(3)
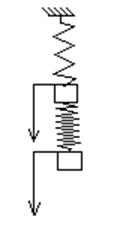
Система (3) описывает
колебания двухмассовой системы, изображенной на рисунке
2.
Решение этой системы ищем в виде: h1=Аsin(kt+a),
h=Bsin(kt+a),
(4)
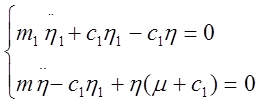
где A, B, k, a - константы, подлежащие определению. Подставим (4) в (3). После сокращения на общий множитель sin(kt+a) придем к однородной линейно-алгебраической системе:
 (5)
(5)
Так как нас не интересует тривиальное решение, то потребуем, чтобы определитель системы (5) был равен нулю:
![]() (6)
(6)
Дальнейшее решение задачи проще выполнять с численными коэффициентами. Подставив в (6) заданные величины, получим:
99k4-3600k2+22500=0
Отсюда : ![]()
Первому из уравнений (4) можно придать форму:
h1=А1sin(5,31t+a1)+A2sin(2,83+a2) (7)
Так как определитель системы (5) равен нулю, значит коэффициенты А и В не являются независимыми. Из первого уравнения этой системы находим: В=(1-m1k2/c1)A
и, значит: B1=(1-6*28,3/50)A1=-2,39A1, B2=(1-6*8/50)A2=0,04A2
Поэтому второе уравнение (4) запишется так:
h=-2,39А1sin(5,31t+a1)+0,04A2sin(2,83t+a2) (8)
Постоянные А1,
А2, a1, a2 найдем из начальных условий: t=0, h1=0,5,
h=0,  ,
, ![]() =0. Дифференцируем (7) и (8) по времени:
=0. Дифференцируем (7) и (8) по времени:
![]() =5,31А1cos(5,31t+a1)+2,83A2cos(2,83t+a2)
=5,31А1cos(5,31t+a1)+2,83A2cos(2,83t+a2)
![]() =-12,7A1cos(5,31t+a1)+0,11A2cos(2,83t+a2) (9)
=-12,7A1cos(5,31t+a1)+0,11A2cos(2,83t+a2) (9)
Подстановка в (9) начальных условий дает:
Квалифицируем эту систему как однородную и линейную относительно cosa1 и cosa2. Определитель данной системы отличен от нуля, так как А1¹0, А2¹0. Значит, cosa1=cosa2=0, откуда a1=a2=p/2.
Подставим теперь начальные условия в (7) и (8). Это даст систему:
 ,
,
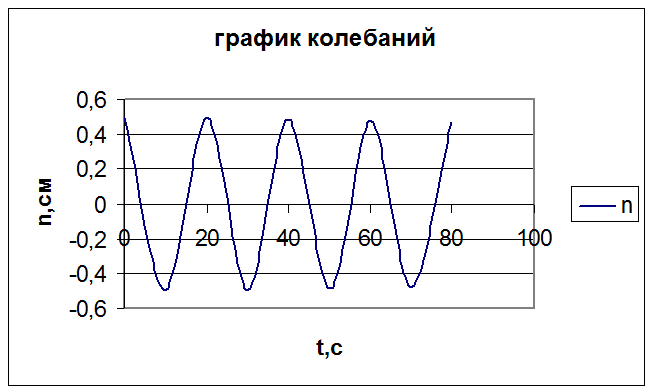
решение которой А1=0,011 см, А2=0,489 см. Уравнение движения груза 1 примет вид:
h1=0,011cos5,31t + 0,489cos2,83t
Из (8) получаем: h=-0,026cos5,31t+0,02cos2,83t
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.