МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ФАКУЛЬТЕТ АВТОМАТИКИ И ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
КАФЕДРА ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
 |
Лабораторная работа №2
«Лексика языков программирования. Конечные автоматы без памяти для обнаружения слов в тексте программы.»
Выполнил: Малахов С.А. Преподаватель:
Группа: АМ-710 Малявко А.А.
Факультет: АВТФ
Вариант: 2332321
Новосибирск 2010
1. Цели работы
Изучение конечных автоматов (КА) без памяти, способов определения КА – канонического, графового и табличного, методов построения недетерминированного КА по системе регулярных выражений, методов эквивалентных преобразований недетерминированных КА в оптимальные полностью определенные КА – лексические акцепторы.
2. Задание
· Используя пакет ВебТрансЛаб, освоить:
o создание лексических правил на языке регулярных выражений (РВ);
o использование операций «+, *, ?, конкатенации и выбора» языка РВ;
o преобразование системы РВ в одноавтоматный лексический акцептор;
o добавление правил и действий в систему РВ для построения мультиавтоматного лексического акцептора;
· Разработать (доработать разработанный при выполнении работы №1) фрагмент системы регулярных выражений для всех (или выбранной самостоятельно части) групп слов языка, определенного заданием на курсовую работу. Построить по этому фрагменту:
o программный модуль, управляемый графом состояний и переходов;
o программный модуль, управляемый таблично;
· Изучить структуру программных модулей, построенных ВебТрансЛабом, изучить алгоритмы работы лексического акцептора для графового и табличного способов реализации КА, сравнить реализации конечных автоматов, управляемых различными способами, между собой;
· Изучить реализацию вызова действий, определенных в лексических правилах и алгоритм работы формирователя лексем.
· Проверить функционирование конечных автоматов, построенных ВебТрансЛабом (подготовить тестовый пример, запустить каждый автомат на выполнение, протрассировать работу лексического акцептора в графовой и табличной реализации, убедиться в работоспособности автоматов, в противном случае – доработать систему РВ и добиться правильного функционирования лексического акцептора).
· Изучить те элементы языка шаблонов, которые используются для преобразования внутреннего представления конечного автомата в программную реализацию лексического анализатора.
3. Индивидуальное задание
Идентификаторы и константы
|
2 |
|
<Б><Ц><пБЦ> |
|
целые вещественные символьные булевские |
Объявления примитивных типов (целое, вещественное, символьное, булево):
|
3 |
|
int[e[g[e[r]]]] double litera bool |
Объявления объектов и создание/уничтожение экземпляров
|
3 |
|
object |
|
build / destroy |
Оператор присваивания:
|
2 |
|
<И> <- <В>; |
Условный оператор:
|
В-т: |
3 |
|
? (<ЛВ>) :<ОБ> [: <ОБ>] |
Переключатель
|
2 |
|
switch<В> { by <К>:<ОБ> [break] …} |
Оператор цикла:
|
1 |
|
while(<ЛВ>) loop <ОБ> |
4.Порядок выполнения работы
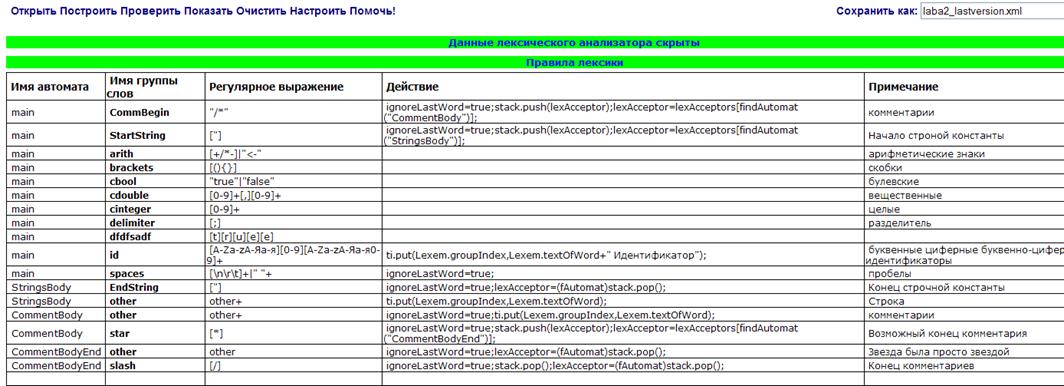
В ходе работы были изучены принципы построения лексических правил на языке регулярных выражений (продолжение лабораторной работы №1). Было рассмотрено преобразование системы регулярных выражений в мультиавтоматный лексический акцептор, после чего были разработаны правила для выявления символьных констант, для этого было создано несколько автоматов, а также «привязать» действия к переходам.
После доработки фрагмента системы регулярных выражений были построены программные модули, управляемые:
· графом состояний переходов,
· таблично.
Были изучены: структура генерируемых программных модулей, вызов действий определенных в лексических правилах.
Была проверена правильность функционирования конечных автоматов построенных пакетом ВебТрансЛаб.
При сравнении было установлено, что табличный и графовый методы приблизительно одинаковы по трудоемкости и сложности реализации. С точки зрения человека графовый способ имеет большую наглядность (по графическому изображению графа очень удобно проверять и продумывать поведение автомата), но при переходе к программной реализации эта наглядность теряется. Табличный метод менее нагляден, но позволяет очень просто реализовать алгоритм на языке программирования, почти не прибегая к написанию особых (не библиотечных) классов. Так же при табличном способе, проще оптимизировать управляющую таблицу.
5.Вывод
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.