E-esinE=M. (2.7)
Решается (2.7) методом последовательных приближений.
Для определения истинной аномалии используются получаемые из треугольника ОКН соотношения
ОН=aсosE=(a2-b2)0,5+rсosq и НК=asinE=(a/b)rsinq, которые приводят после громоздких выкладок к простым формулам;
sinq=(cosE-e)/(1-ecosE), сosq=[(1-e2)0,5sinE]/(1-ecosE). (2.8)
Радиальная vr=dr/dt и тангенциальная vt=rdq/dt составляющие скорости ИСЗ находятся c помощью (2.4) и (2.5) в виде
vr=(ma/b2)0/5esinq, vt=(ma/b2)0/5(1+ecosq). (2.9)
18
2.3. Принципы определение положения ИСЗ в пространстве
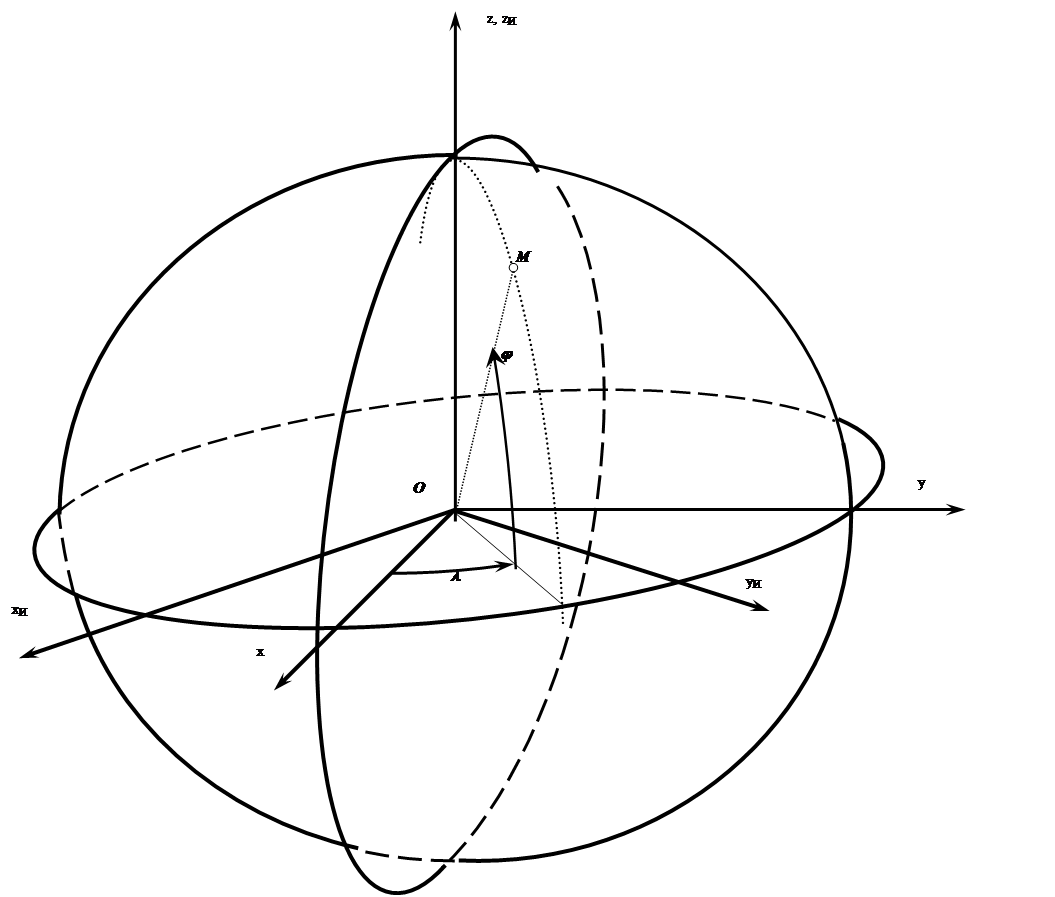
2.3.1.В ряду используемых в CРНС систем координат наиболее важны две декартовые геоцентрические (с началом в центре Земли): инерциальная {xИ, yИ, zИ} и гринвичская {x, y, z} с общей осью аппликат - осью вращения Земли, направленной в полюс мира вблизи Полярной звезды. С этой осью и совмещены оси zИи z (см. рис. 2.4). Плоскости xи0yи и x0y совмещены с экваториальной плоскостью, которую орбита ИСЗ пересекает в двух точках, называемых: 1) восходящий узел и 2) нисходящий узел. Ось абсцисс xи инерциальной (неподвижной) системы координат направлена на созвездие Овна и параллельна прямой, соединяющей центры Земли и Солнца в момент весеннего равноденствия (равной освещенности Северного и Южного полюсов Земли). Оси x,y гринвичской системы вращаются вместе с Землей. В момент равноденствия и далее через каждые сутки оси абсцисс х и у оказываются совмещенными.
|
|
||||||
 |
|||||||
|
|||||||
19
 |
20
В судовождении находят применение и географические координаты (широта и долгота).
Следует заметить, что перевод аналитических выражений координат ИСЗ из одной системы координат в другую выполняется с использованием известных из аналитической геометрии формул преобразования координат в матричной форме, реализуемых в алгоритмах микропроцессоров судовой аппаратуры без затруднений. Поэтому далее выбор вида координатной системы будет обуславливаться лишь критериями удобства пользования и компактности изложения.
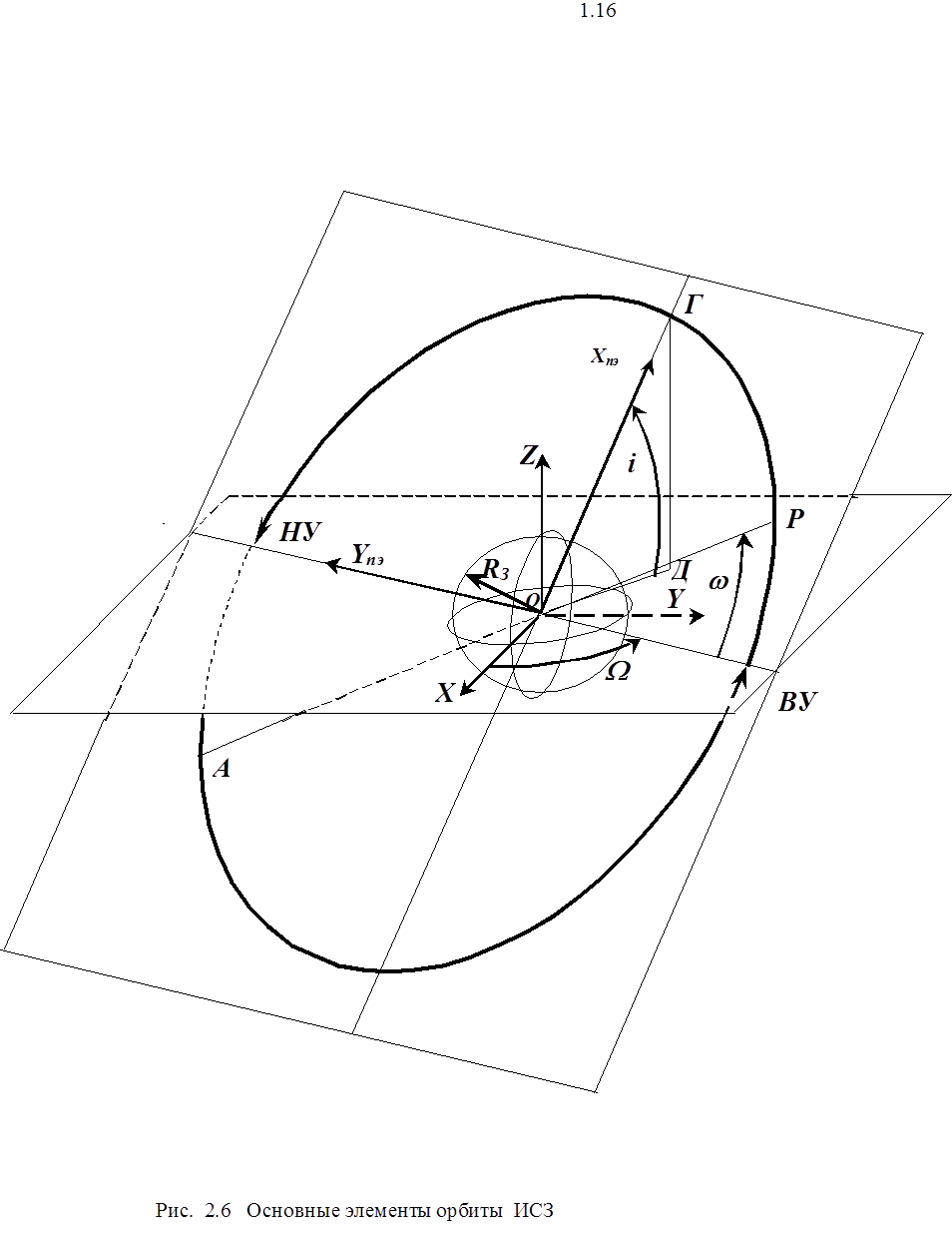
2.3.2. Формулы п. 2.2 определяют только на плоскости орбиты текущие координаты ИСЗ (соответствующие моменту времени t) при трех известных параметрах a, e и tП. Для определения координат в пространстве необходимо знать еще три параметра. Обычно для геоцентрических систем это (см. рис. 2.6):
- долгота W восходящего узла - точки перехода ИСЗ из южного в северное полушарие,
- угол i наклонения орбиты, т. е. угол между плоскостью орбиты и плоскостью экватора;
- аргумент (угол) перигея wмежду радиусами-векторами перигея и восходящего узла (иногда в рассмотрение вводят вводят угол u=w+q, который называют фазой ИСЗ или аргументом широты).
2.3.3. В разделе 2 пока рассматривалась идеализированная модель воздействия на ИСЗ лишь центрального поля тяготения при отсутствии возмущающих сил. Однако Земля неоднородна и не шарообразна, на ИСЗ воздействует «солнечный ветер» и т.п. Эти возмущающие факторы (хотя и на 5-6 порядков меньше, чем центральное гравитационное поле) приводят к необходимости полагать отмеченные выше шесть параметров W(t). I(t),w(t), a(t), b(t), tП(t) медленно меняющимися во времени. Причем вводят так называемые оскулирующие параметры, определяемые на некоторый интервал времени в предположении отсутствия возмущений. В системе GPS изменения параметров учитываются в виде аддитивных поправок, имеющих вид линейной комбинации синуса и косинуса удвоенного (также исправленного) аргумента широты. Используемые в служебном сообщении оскулирующие параметры и поправки приведены в приложении.
В служебном сообщении СРНС GPS передаваемые оскуллирующие элементыотнесены к наперед заданному моменту времени tос (опорному моменту времени эфемерид), являющемуся примерно серединой часового отрезка, на котором необходимо выполнить прогноз координат и скорости ИСЗ. На момент tос сообщается шесть кепплеровских параметров:
1) средняя аномалия Mo,
2) корень квадратный из большой полуоси эллипса Ö a,
3) долгота восходящего узла (в Гринвичской системе координат) W0,
4) наклонение орбиты i0,
5) эксцентриситет e,
6) аргумент перигея w.
Передаются две константы: гравитационная постоянная Земли m=3.986008.1014м3/с2, угловая скорость Земли W=7.2922115147.10-5с-1, и значения 4-х величин:
1) отклонение среднего движения спутника от расчетной величины Dn,
2) скорость прецессии восходящего узла Wa,
3) коэффициентов формулы (1.6) для поправки шкалы времени ИСЗ,
21
4) интервала времени tl-tос,где tl-момент времен последних измерений, по которым на Земле вычислялись данные, закладываемые затем в память спутника.
Эта разность, отображающая возраст эфемерид, передается словом AODE в начале и конце эфемерид. По этому слову можно судить о степени надежности данных, получаемых потребителем от спутника.
Передаются и три пары амплитуд косинусной и синусной гармоник соответственно для трех поправок:
22
1) широты Cuc, Cus ,
2) радиусу орбиты Crc, Cur,,
3) углу наклонения Cic, Cis.
По принятому сообщению в АП вычисляются:
1) большая полуось эллипса a=(Öa)2,
2) средняя угловая скорость ИСЗ no= 2p /T =Öm/a3,
3) время прогноза (для k-го момента) tk=t-tос,
4) скорректированная средняя угловая скорость ИСЗ n =no+Dn,
5) средняя аномалия Mk=Mo+n tk .
По полученным и расчетным данным решается уравнение Кеплера Ek-eSin Ek=Mk с определением эксцентрической аномалии Еk и, затем, истиной аномалии qk - c использованием выражений (2.8).
Далее вычисляются:
- неисправленный аргумент широты Fk=wk+ qk;
- поправка аргумента широты duk=Cussin2Fk+Cuccos2Fk;
- поправка радиуса drk=Crssin2Fk+Crccos2Fk;
- поправка угла наклонения орбиты dik =Cissin2Fk+Ciccos2Fk;
- исправленный аргумент широты uk=Fk+duk;
- исправленный радиус rk =a(1-e2) /(1-cosqk)+ drk;
- исправленный угол наклонения ik=io+dik .
Эти данные позволяют сначала определить координаты ИСЗ в орбитальной плоскости: xko=-rkcosuk и yko=rksinuk.
Затем вычисляют долготу восходящего узла в гринвичской системе
Wk=W0+(Wа-W)tk-Wtoc, после чего вычисляют гринвичские координаты
xk=xkocosikcosWk-yksinWk, yk=xkocosiksinWk+ykcosWk, zk=xkosinik
с погрешностью единиц метров при ½tk- tос½£ 0.5 часа.
Производные координат ИСЗ , т.е. проекции vxk, vyk vzk вектора линейной скорости находятся /6/ с использованием формул (2.9) для радиальной vrk=drk/dt=(ma/b2)0/5esinqk и тангенциальной vtk=rkdqk/dt =(ma/b2)0/5(1+ecosqk) составляющих этого вектора:
vxk=vrkxk/rk - vtk(sinukcosWk + cosukcosiksinWk)
vyk=vrkyk/rk - vtk(sinuksinWk + cosukcosikcosWk)
vzk=vrkzk/rk + vtkcosuksin ik.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.