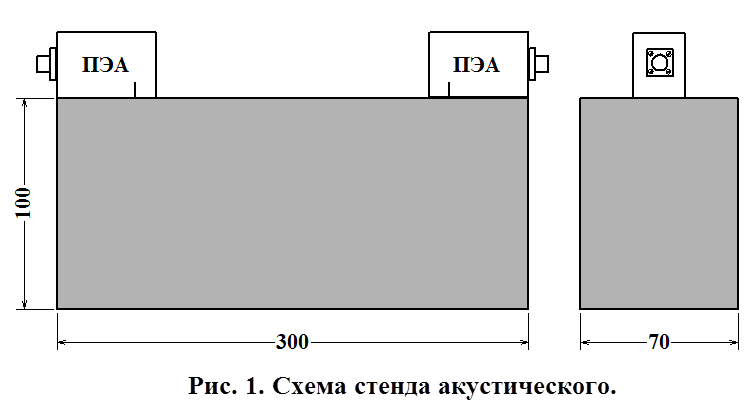
4.1. Стенд СА-01 представляет собой призму (рис.1), изготовленную из органического стекла СОЛ-70. На верхней поверхности призмы устанавливаются ПЭА, расстояние между акустическими центрами которых равно удвоенной высоте призмы.
4.2. Имитатор расхода
4.2.1. Функциональная схема имитатора расхода (ИМР) изображена на рис.2. ИМР содержит блок питания (БП), блок микропроцессора (БМП), блок формирования задержек (БФЗ) и внешний пульт управления (ПУ).
БП - предназначен для обеспечения всех узлов ИМР необходимыми питающими напряжениями.
БМП - предназначен для управления работой всех входящих в состав имитатора расхода блоков и состоит из вычислительного узла (ВУ), производящего расчет расхода, и узла индикации(УИ), управляющего работой индикатора и внешнего пульта управления, обеспечивающего диалоговое взаимодействие оператора с ИМР.
БФЗ - предназначен для формирования импульсов YN1, задержанных на заданное время относительно импульсов YN в цепи автоциркуляции расходомера, подключаемого к разъему “Х1” имитатора.
В состав БФЗ входят следующие узлы:
- мультиплексор MX,
- аналоговый коммутатор АК,
- триггер ТТ1,
- генераторы ударного возбуждения ГУВ1...ГУВ3,
- сдвиговый регистр RG,
- схема принудительного запуска СПЗ,
- усилитель импульсов У,
- генератор опорной частоты ГОЧ,
- регистр диапазона РД,
- регистр режима РР,
- счетчик СТ,
- логические элементы ЛЭ.
БФЗ управления работает в двух режимах: имитации и калибровки, которые определяются сигналами IMR и KLB следующим образом:
|
Значение сигнала |
Режим |
|
|
IMR |
KLB |
|
|
1 0 |
0 1 |
имитация калибровка |
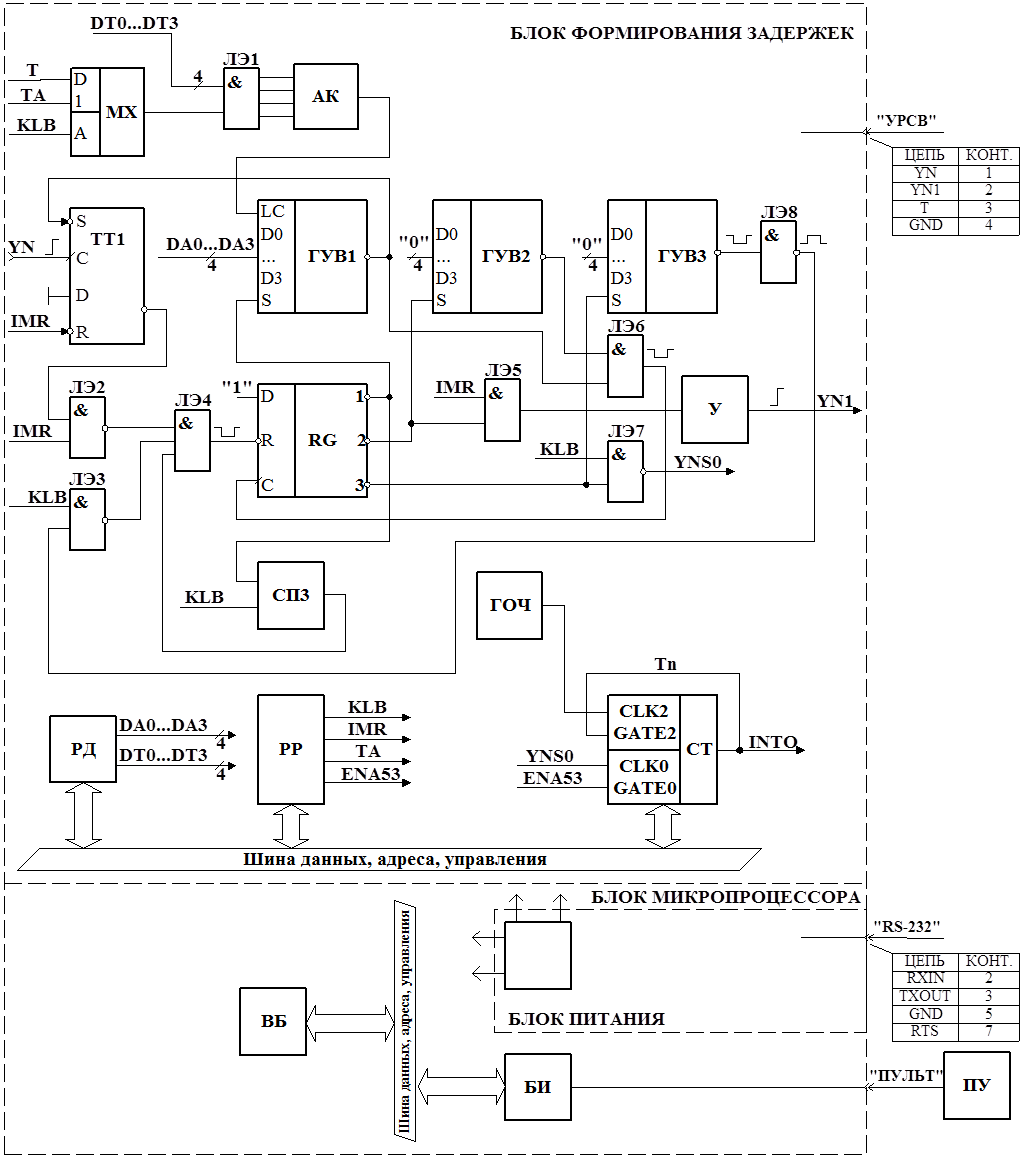
Рис. 2. Функциональная схема имитатора расхода.
В режиме имитации (IMR=1) входной импульс YN, поступающий из расходомера, устанавливает триггер ТТ1 в "0" состояние, в результате чего через ЛЭ2 и ЛЭ4 на входе сброса R сдвигового регистра RG устанавливается логический"0". При этом сигнал логическая "1" с выхода 1 сдвигового регистра RG, поступая на вход S ГУВ1, создает условия для его возбуждения, и ГУВ1 формирует нужное количество импульсов (число которых определяется кодом D0...D3). По окончанию формирования этих импульсов сигналом с выхода ГУВ1 триггер ТТ1 по входу S устанавливается в "1" состояние. При этом на входе R сдвигового регистра RG устанавливается лог."1", что разрешает работу RG по входу С. Сигнал " " с выхода ГУВ1 через ЛЭ6 поступает на вход С сдвигового регистра RG, при этом на выходе 1 устанавливается лог."0", и ГУВ1 выключается. Одновременно на выходе 2 сдвигового регистра RG устанавливается сигнал лог."1", который разрешает работу ГУВ2. По окончании работы ГУВ2 (после подсчета 16-ти импульсов, что определяется лог."0" на входах D0...D3 ГУВ2) сигнал с его выхода через ЛЭ6 поступает на вход С сдвигового регистра RG и лог."0" на его выходе 2 выключает ГУВ2.Сигнал с выхода 2 сдвигового регистра RG, проходит через ЛЭ5 на усилитель для формирования выходного задержанного импульса YN1, длительность которого равна времени работы ГУВ2, а время задержки Тз между передними фронтами YN и YN1 определяется как:
![]() (4М - 1)
(4М - 1)
![]() Тз = × (Тг + Тэ), (1)
Тз = × (Тг + Тэ), (1)
4М
где: Тг - период колебаний ГУВ1;
М - значение кода D0...D3 (номер диапазона 1...16);
Тз - дополнительные задержки в электронных узлах.
Период колебаний ГУВ1 определяется с помощью аналогового коммутатора АК, который подключает емкости, включаемые в колебательный контур ГУВ1 через вход LC. Значение подключаемой емкости определяется кодом DT0...DT3, задающим номер точки внутри диапазона.
Управление ГУВ1 осуществляется сигналом Т следующим образом.
При Т=0 на втором входе ЛЭ1 устанавливается лог."0", при этом подключение емкостей в АК не происходит и период генерации колебаний ГУВ1 - минимален и составляет:
![]() Тгмин = А ÖСк ,
(2)
Тгмин = А ÖСк ,
(2)
где: Ск - емкость в колебательном контуре ГУВ1, определяющая минимальный период;
А - коэффициент пропорциональности.
При Т=1 на втором входе ЛЭ1 устанавливается лог."1", при этом подключение емкостей в АК определяется кодом DT0...DT3, а период Тг1 ГУВ1 определяется по зависимости:
![]() Тг1
= А Ö(Ск + Снт) ,
(3)
Тг1
= А Ö(Ск + Снт) ,
(3)
где Снт - емкость, определяемая кодом DT0...DT3 и соответствующая номеру точки Nt.
Таким образом, можно принять, что:
Снт = В · Nt, (4)
где В - коэффициент пропорциональности.
Приращение периода ГУВ1 в пределах диапазона dТг, таким образом, определяется как:
![]()
![]() dТг
= Тг1 - Тгмин. = К {Ö(Ск
+ B Nt) - ÖСк} (5)
dТг
= Тг1 - Тгмин. = К {Ö(Ск
+ B Nt) - ÖСк} (5)
Следовательно, разность времен задержки сигнала YN1 при Т=0 и Т=1 может быть определена как:
![]()
![]() dТз = М × К {Ö (Ск
+ B Nt) - ÖСк}. (6)
dТз = М × К {Ö (Ск
+ B Nt) - ÖСк}. (6)
Коэффициент М определяется кодом D0...D3 (номер диапазона), а коэффициент Nt определяется кодом DT0...DT3.
К - коэффициент преобразования.
В режиме калибровки (KLB=1) производится контроль разности времен задержки при работе БФЗ в режиме автогенерации: предположим, что в исходном состоянии на вых.1 RG имеется сигнал лог."0". Тогда сигнал лог."0" поступает с выхода СПЗ через ЛЭ4 на вход R сдвигового регистра RG и устанавливает на вых.1 RG сигнал лог."1".
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.