Источник избыточного давления в колонне – пары. Имеется возможность отвода их в дефлегматор, где большая часть паров конденсируется и конденсат поступает во флегмовую емкость, вместе с не сконденсировавшимся паром. Там происходит сброс неконденсирующегося компонента в специальную линию. Это (отвод пара) приводит к снижению давления в колоне. Относительно работы АСУ: датчик снимает показание давления с ВЧРК, преобразует его к стандартному информационному сигналу, который поступает на вход регулирующего элемента. В регуляторе (в нашем случае это ПИД-регулятор), исходя из заданных параметров регулирования (динамически задаваемых), происходит выработка стандартного управляющего сигнала, который должен быть адекватно воспринят и отработан исполнительным устройством. В нашей системе исполнительный элемент это клапан, и именно он (в объеме, эквивалентном заданному сигналу ПИД-регулятора) влияет на величину входного воздействия на объект. При этом, по рис. 1 видно, что исполнительный элемент влияет на сброс неконденсирующегося компонента (пара) в дополнительную линию, влияя тем самым на входную величину объекта.
|
4.2 Составление структуры САУ и определение ее параметров |
На основании описания процесса регулирования получаем структуру САУ:
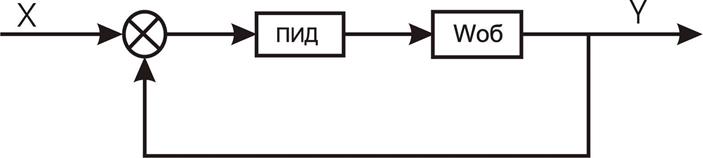
Рис. 2
Объект управления будет представлять собой инерционное звено первого порядка. Для такого звена необходимо определить коэффициент передачи и постоянную времени. Коэффициент передачи объекта всегда меньше 1. Примем k =0.7.
Постоянная
времени – время (в секундах), за которое функция изменяется в ℮ раз. Давление
может измениться в ℮ раз за очень короткий промежуток времени, составляющий
секунды. Примем Tинт =2 с. Таким образом,
объект будет описываться следующей передаточной функцией Wоб (p) = .
.
Определим
параметры ПИД-регулятора. Для него необходимо определить k , Tинт и Tдиф
. k – статический коэффициент передачи разомкнутой системы. k может быть
найден по формуле k =1/ε, где ε – величина статической ошибки. ε может быть
найдено из условия соблюдения уровня давления: 1,75±0.1
кПа. ![]()
Тогда k
=1/0.057=17.5. Примем Tдиф =1. Tинт на порядок меньше, чем Tоб , т. е. Tинт
=0,2. Таким образом, ПИД регулятор описывается следующей передаточной функцией
WПИД(p) =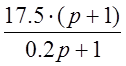 .
.
|
4.3 Построение решения задачи в рамках стратегии |
В редакторе задач пакета, в рамках нашей стратегии, в конечном итоге, мы должны построить решение задачи регулирования давления ВЧРК. Это построение ведется визуально, путем размещения пиктограмм в окне редактора задач. За каждой из пиктограмм подразумевается функциональность, реализующаяся программно. (Фактически одна пиктограмма – отдельный программный модуль или программное обеспечение).
Параметры давления, поступающие с верхней части ректификационной колонны, регистрируются измерителем давления – датчиком давления «Сапфир 22Р» (ток).

Рис. 3.
Пиктограммой является блок аналогового ввода AI, показанный на рис. 5 и предназначенный для приема информации от устройств, имеющих подсистему ввода аналоговых сигналов, и передачи указанных сигналов другим функциональным блокам и элементам отображения. То есть данная пиктограмма реализует драйвер внешнего устройства (датчика), сигнал с которого необходимо получить и передать другим пиктограммам (программным обеспечениям) в двоичной форме.
Блок имеет ряд необходимых параметров для его полноценной работы, которые можно изменять в диалоговом окне настройки параметров блока. Параметры на рис. 6.
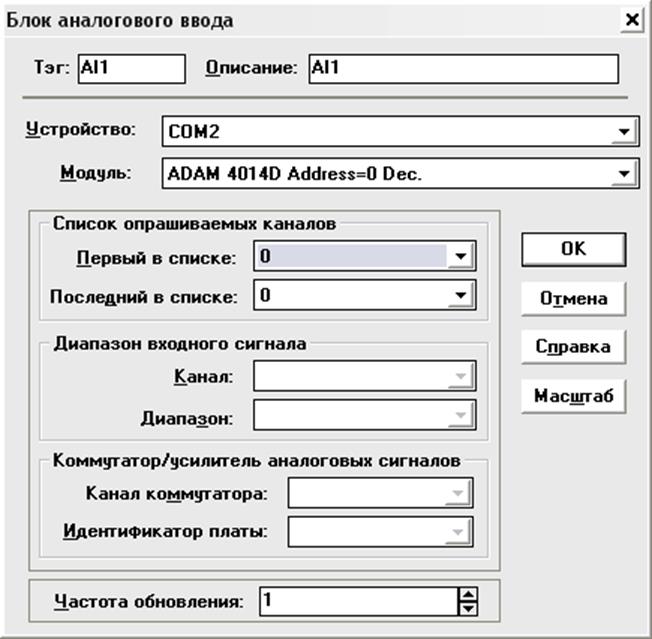
Рис. 4.
Для устройств контроля подбирается контроллер серии ADAM – 4000. Таким контроллером является ADAM – 4014D со следующими характеристиками
· 1 аналоговый вход (максимальное напряжение ± 10В);
· 1 дискретный вход и/или 1 канал счетчика событий;
· 2 дискретных выхода или 2 выхода – защелки сигнала аварийного дискретного управления по верхней и нижней границам входного сигнала;
· 1 дискретный светодиодный дисплей.
Устройство управления – регулятор. Пиктограммой (программным обеспечением) является ПИД-регулятор, изображен ниже. Пиктограмма и его характеристики приведены на следующих рисунках.

Рис. 5.
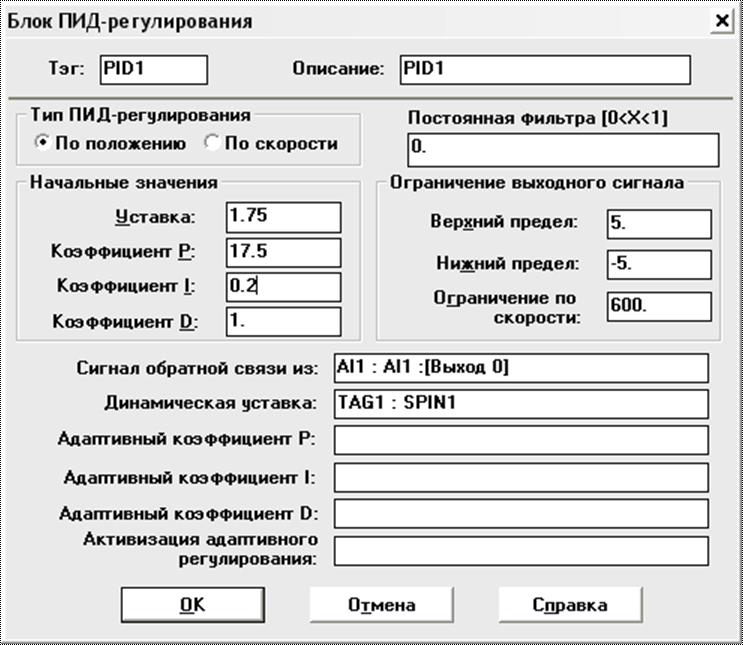
Рис. 6.
Блок ПИД-регулирования имеет входы и выход управления. Один из входов предназначен для ввода измеряемого значения сигнала обратной связи от объекта управления. Кроме того, по одному из входов может вводиться динамически изменяемое значение уставки (значение стабилизации). Выход блока предназначен для выдачи сигнала регулирования, связываемого с аналоговым выходом физического устройства, которое непосредственно осуществляет управление объектом.
Программное обеспечение исполнительных устройств отображается на экране пиктограммой рис. 9. Такой пиктограммой отображается функциональность блока аналогового вывода, предназначенный для передачи информации, получаемой от других функциональных блоков, элементов отображения или других приложений Windows посредством механизма динамического обмена данными (DDE) устройствам, имеющим подсистему вывода аналоговых сигналов. Изображение блока и его параметры приведены на следующих рисунках.

Рис. 7.
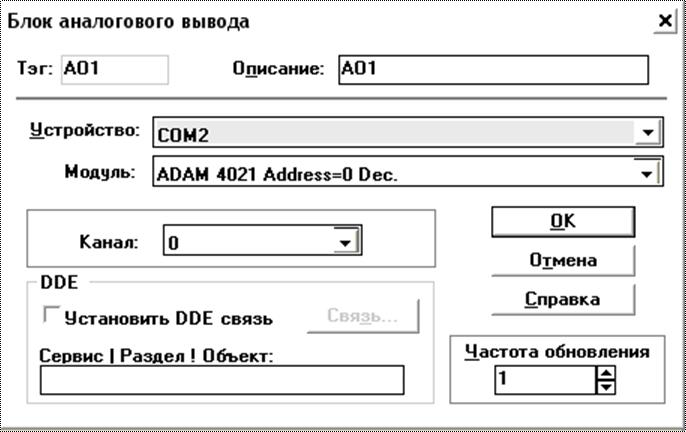
Рис. 8.
Для AO1 был выбран модуль ADAM-4021, обладающий следующими характеристиками:
· 12-разрядный ЦАП;
· программная настройка выхода на В или мА;
· контроль состояния выхода;
· программируемая скорость изменения сигнала на выходе: от 0,125 до 128 мА/с или от 0,0625 до 64 В/с;
· гальваническая изоляция 500 В.
Об аварийных ситуациях оператора предупредит индикатор аварий. Пиктограммой является блок архива тревог. Этот блок предназначен для сохранения в архиве информации о зафиксированных аварийных событиях, связанных с сигналом, поступающим на вход бока архива тревог. Пиктограмма блока приведена на следующем рисунке.

Рис. 9.
Сообщения об аварийных событиях могут отображаться в окне Журнала событий и подтверждаться пользователем в процессе исполнения стратегии, когда значение на входе блока попадает в следующие диапазоны:
· выше верхнего предельного значения;
· между максимальным и верхним предельным значениями;
· между максимальным и минимальным значениями;
· между минимальным и нижним предельным значениями;
· ниже нижнего предельного значения.
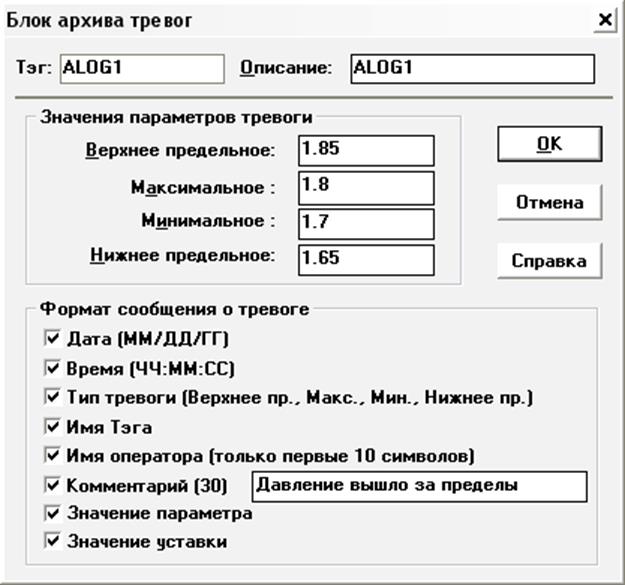
Рис. 10.
После того, как необходимое программное обеспечение подобрано, и перенесено в редактор задач, соединив их стрелками в правильном порядке (они, по аналогии, означают программную связь между программными модулями-пиктограммами), получим структурную схему решения задачи регулирования давления.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.