Выборки после коммутатора каналов и преобразователя «напряжение-код» поступают в цифровой форме на устройство устранения избыточности, в качестве которого выступает предсказатель нулевого порядка (ПНП), где формируются существенные выборки в каждом канале. После ПНП выборки поступают в устройство согласования суммарного потока существенных выборок с синхронной радиолинией (УС с СРЛ). Существует два основных класса устройств согласования: с БЗУ и адаптивные коммутаторы. Затем выборки поступают в формирователь формата кадра (ФФК) и на модулятор и передатчик (М и П).
Наиболее эффективным методом устранения избыточности является апертурный метод. В этом методе по результатам наблюдений предыдущих выборок предсказывается, например, область (апертура) значений передаваемого сообщения в последующие моменты времени. Выборки сообщений, попавших в данную апертуру предсказания, считаются избыточными и не передаются. Размер апертуры выбирается таким образом, чтобы в приемном устройстве по принятым выборкам можно было восстановить сообщение с заданной точностью. Существует множество видов предсказателей, но на практике чаще всего используются номинальные предсказатели, работа которых не связана со статистическими свойствами сообщений, в отличие от, например, предсказателя условного среднего (оптимального) . Из работы оптимального предсказателя следует, что при формировании предсказанного значения более ранним выборкам придается меньший вес по сравнению с более поздними. В номинальном же всем выборкам предается одинаковый вес. Кроме того, при использовании номинальных предсказателей высоких порядков, необходимо вычислять амплитуды выборок с очень высокой точностью для определения разности первых, вторых и т. д. порядков. Поэтому наиболее часто используется предсказатель нулевого порядка, который менее эффективен, но более прост в технической реализации.
3.Выбор и обоснование структурной схемы системы.
Примером построения радиотелеметрических систем является система «Диджилок» (рис.4).
Рис.4
ЭК- электронный коммутатор, КУс- кодирующие устройство, СС- система синхронизации, СВНС- схема выявления небольшого сигнала, МЦП- матрица цифрового преобразования, РУ- регистрирующее устройство.
В системе используется многоканальная радиолиния с временным уплотнением. Непрерывные сигналы от датчиков подводятся к электронному коммутатору, уплотняющему радиолинию. С выхода коммутатора выборки с изменяющейся амплитудой подводятся к АЦП, который преобразует их в пятиразрядные бинарные сигналы с КИМ. Эти сигналы с помощью кодирующего устройства преобразуются в 32 ортогональных сигнала, представляющие собой последовательности из 16 двоичных импульсов, построенных согласно модифицированному коду Рида-Мюллера с большой избыточностью. Несущее колебание передатчика манипулируется по фазе указанными импульсами последовательности. На выходе земного синхронного приемника с полосой 10-15 Гц получают последовательности видеоимпульсов, соответствующие ортогональным сигналам, посылаемым передатчиком. Эти последовательности подводятся к 32 фильтрам, каждый из которых согласован с одним из 32 сигналов. Согласованные фильтры состоят из линий задержек с 16 отводами, которые подключены через линейную суммирующую матрицу к 32 шинам. Когда какая–либо из 32 импульсных последовательностей заполнит линию задержки, на выходе соответствующей шины появляется положительное напряжение, на других шинах напряжение равно нулю. Выходные напряжения шин с помощью схем выявления наибольшего сигнала преобразуются в напряжения аналоговой или цифровой формы, которые подводятся к регистрирующему устройству и индикатору.
Данная схема является сложной для анализа, поэтому в курсовом проекте будем рассматривать и дорабатывать более простые схемы.
Структурная схема многоканальной РСПИ с КИМ (рис.5)
И- источник
П –получатель
ВС- временной селектор
ОМ-общий модулятор
Рис.5
Функциональная схема бортовой аппаратуры с КИМ(рис.6)
Рис.6
КК-коммутатор каналов
ПНК- преобразователь «напряжение-код»
ССК- схема смешения каналов
Хр- хронизатор
Функциональная схема приемной части радиолинии с КИМ(рис.7)
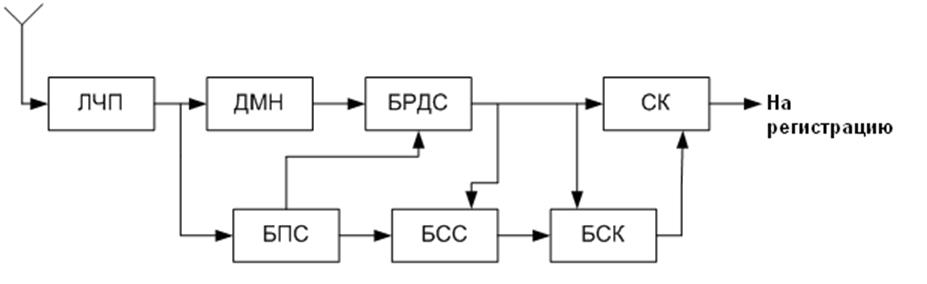
Рис.7
ЛЧП- линейная часть приемника
ДМН- демодулятор несущей
БРДС- блок регенерации двоичных сигналов
СК- селектор каналов
БСС- блок синхронизации слов
БПС- блок посимвольной синхронизации
БСК- блок синхронизации кодов
Используя приведенные выше схемы и устройство калибровки системы, получаем структурную схему разрабатываемой радиотелеметрической системы (рис.8).
Специальный бортовой датчик ДК вырабатывает калибровочный сигнал, интенсивность которого поддерживается постоянной или изменяется по определенному закону. Этот сигнал используется для коррекции принятой информации.
Последовательность тактовых импульсов управляет схемой регенерации двоичных символов, которая преобразует сигнал и шумы после детектора в последовательность двоичных импульсов стандартной формы, например прямоугольной. Действие шумов проявляется в том, что вместо «1» может приняться «0» и наоборот.
Рис.8
Структурная схема устройства.
4) Выбор и расчет основных технических характеристик системы.
а) Диапазон излучаемых частот
При выборе диапазона излучаемых частот радиолинии, необходимо придерживаться следующих требований:
1) выбранная частота должна обеспечивать на выходе заданное отношение мощностей сигнал/шум при возможно меньших габаритах, массе и потреблении питания передающего устройства.
2) взаимные помехи космических радиолиний между собой и с линиями других служб должны быть малы.
3) радиооборудование КЛА должно быть как можно проще и надежнее.
Для снижения температуры Твн внешних шумов, воздействующие на земные приемные устройства, выбирают частоты в пределах от 1 до 10 ГГц. Так как общая шумовая температура приемного устройства:
![]() ,
,
где ![]() -температура шумов приемников, то с
уменьшением
-температура шумов приемников, то с
уменьшением ![]() диапазон частот, дающих наименьшее
значение
диапазон частот, дающих наименьшее
значение ![]() , суживается.
, суживается.
При заданной точности изготовления зеркал приемных антенн, рост частот приводит к падению их эффективной поверхности, что вызывает ослабление принимаемых сигналов. В то же время, рост частот позволяет увеличить усиление передающих антенн при условии точности их изготовления, но уменьшается КПД и мощность передатчиков.
Учитывая это, для широкополосной радиолинии КЛА-Земля выбираются частоты 2-4 ГГц. Переход к более высоким частотам может уменьшить отношение сигнал/шум из-за уменьшения мощности передатчика. Поэтому выбираем частотный диапазон 3400-4200 МГц и частоту поднесущей F1=3997МГц.
б) Характеристика и параметры помех
Влияние помех системы характеризуется суммарной температурой на входе приемника:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.