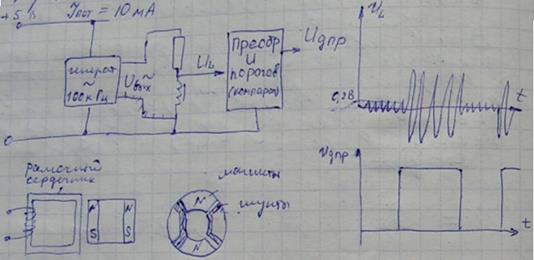
- погрешность угла измерения 5 эл. Градусов
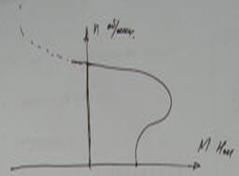
- индуктивность в насыщенном состоянии L=0.0001Гн
- индуктивность в ненасыщенном состоянии L=0.0012Гн
во всех условиях эксплуатации.
2) Датчик Холла. (При воздействии магнитного поля в нем появляется ЭДС и протекает ток) Серия 1116КП7; 1116КП8;
погрешность 5 эл градусов.
2) ДПР построенные на основе магниточувствительных резисторов
3) ДПР на основе оптических датчиков
4) Кодовые цифровые датчики
5.1 Вентильный электродвигатель переменного тока. Современные устройства управления мощными асинхронными электродвигателями.
Наряду с вентильными двигателями постоянного тока имеются в соответствии с ГОСТ 27471-87 вентильные электродвигатели переменного тока, а также вентильная машина переменного тока: Бесконтактная машина переменного тока обмотка якоря которой связана с внешними цепями через вентильное коммутирующее устройство и у которой отношение частоты вращения ротора к частоте тока цепи, подключенной к машине зависит от нагрузки и может быть изменено за счет фазового положения импульсов управления, подаваемых на вентили.
Асинхронные электромашины.
Асинхронными мощными электродвигателями управляет преобразователь частоты. Преобразователь частоты представляет собой следующее устройство
Преобразователь частоты с управлением вектором тока
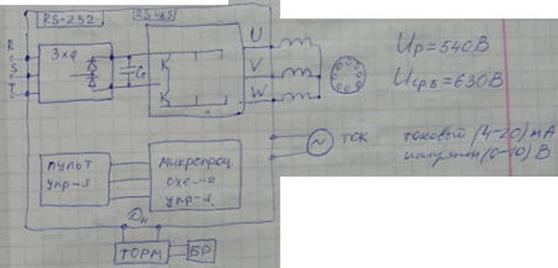
В общем случае преобразователь частоты, управляющий асинхронными двигателями
По частоте:
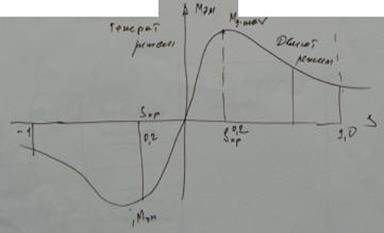
S=(n1-n)/n; где n1- частота вращения магнитного поля якоря (статора); n – частота вращения ротора.
{
{С помощью пульта управления задаются различные константы для управления электродвигателем.
В – по применению
С – настройки
D – задания
F – дополнит устройства
Н – клеммы управления
L – защиты
O – пульт управления }
Можно задавать с пульта управления преобразователя или с компьютера.
В нашем случае
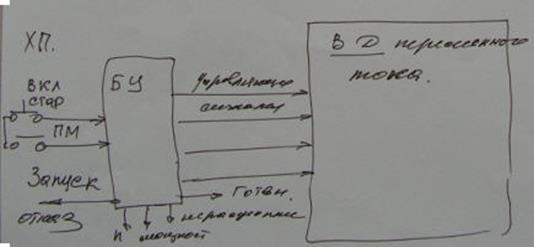
- сигнал ?
- перегревы между запусками
- нерасцепление статора
- средства встроенного контроля
- - напряжение питания в норме
- - частота статора меньше 800 об/мин
- - интервалы времени
лекция 8
Вентильно-индукторные двигатели.
Электрическая машина является одним из основных элементов любого электромеханического устройства. Поэтому улучшение его характеристик связано с совершенствованием электрической машины, в частности с оптимизацией процесса электромеханического преобразования энергии. Процесс оптимизации был связан с совершенствованием материалов, технологии производства и конструкции двигателя. В настоящее время набор способов совершенствования Эл машин за счет перечисленных выше исчерпан. Поэтому дальнейшее совершенствование электромеханического преобразования энергии сейчас движется по пути управления процессом преобразования Эл энергии. Качественный скачок в этом направлении обозначен разработкой интеллектуальных преобразователей энергии, которые одновременно осуществляют преобразование энергии и управление этим преобразованием. Эти устройства представляют собой с одной стороны электрическую машину, а с другой стороны интегрированную в это устройство систему регулируемого электропривода. К таким преобразователям можно отнести вентильно-индукторный двигатель (ВИД).
В мировой литературе ВИД имеет много других названий: управляемый вентильный реактивный двигатель, коммутируемый реактивный двигатель с переменным магнитным сопротивлением, бесконтактный реактивный двигатель, двигатель с электромагнитной редукцией.
Бурное развитие ВИД началось 20 лет назад, хотя идея реактивного двигателя была опробована в 30 гг 19 столетия. Низкая надежность, малый срок службы определил судьбу этих двигателей – о них надолго забыли.
Стремительное развитие силовой и информационной электроники создало предпосылки и обеспечило техническую базу для разработки и производства ВИД. ВИД представляет собой относительно новый тип электромеханического преобразователя энергии, в теории и практике которого еще много белых пятен.
Мы рассмотрим ВИД с пассивным ротором.
1.1 Структурная схема вентильно-индукторного двигателя.
ВИД – это новый тип электромеханического преобразователя энергии, который сочетает в себе свойства и электрической машины и интегрированной системы регулируемого электропривода. Как всякий электродвигатель, ВИД преобразует электрическую энергию, которая поступает от питающей сети, в механическую энергию, передаваемую в нагрузку. Как система регулируемого электропривода ВИД дает возможность управлять этим процессом: регулировать частоту вращения, момент и закон движения.
Структурная схема ВИД.

ИМ – индукторная машина
ПЧ – преобразователь частоты
СУ – система управления
По своей структуре ВИД представляет собой систему регулируемого электропривода, однако в отличии, например, электропривода АД, индукторная машина не является самодостаточной. Она принципиально не может работать без преобразователя частоты. ПЧ и СУ являются неотъемлемой частью ИМ, необходимыми для осуществления преобразования электрической энергии в механическую.
1.2 Особенности конструкции индукторной машины ВИД.
 Входящая в состав ВИД
индукторная машина приведена на рис
Входящая в состав ВИД
индукторная машина приведена на рис
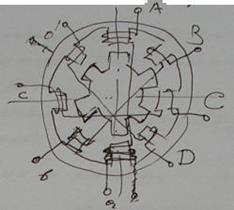
Рисунок – поперечное сечение 4х фазной ИМ
Конструктивные особенности ИМ:
1. Сердечник ротора и статора имеют явнополюсную структуру.
2. число полюсов статора больше числа полюсов ротора.
3. сердечник ротора и статора выполняют шихтованными.
4. обмотка статора – сосредоточенная катушечная, она может быть одна.
5. Фаза ИМ, как правило, состоят из двух катушек, расположенных на диаметрально расположенных полюсах статора.
6. Катушки фазы в электрическом отношении могут быть включены параллельно или последовательно, в магнитном – согласно или встречно.
7. Обмотка на роторе отсутствует.
1.3 Конструктивные исполнения ВИД.
Конструктивно ИМ, ПЧ и СУ могут быть выполнены раздельно. При этом в процессе работы они могут находиться на достаточно большом расстоянии друг от друга. Однако в последнее время наблюдается устойчивая тенденция выполнения всех частей ВИД, включая ДПР в одном корпусе.
В ВИД интегральное исполнение ПЧ и ИМ является более экономически выгодным по сравнению с частотно-управляемым АД (число секций в ВИД в 2 раза больше, так как все катушки независимые).

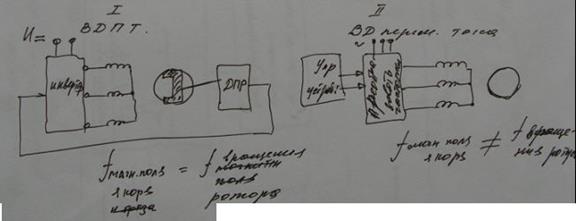
Рисунок а)схема соединения в ВДПТ и ЧУАД
б) схема соединения в ВИД
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.