Тогда величина статической ошибки составит:

Относительная статическая ошибка:

Сравнивая относительную статическую ошибку с требованиями, предъявляемыми к электроприводу, можно заключить, что синтез произведен верно и требуемая жесткость характеристик обеспечена.
Построим статические характеристики разомкнутой и замкнутой системы электропривода:
Рис.7. Статические характеристики:
1 – разомкнутой системы; 2 – замкнутой системы.
7. Анализ динамики электропривода
Анализ динамики системы автоматического управления электроприводом пассажирского лифта заключается в построении переходных процессов и определении по ним основных динамических показателей системы (перерегулирование, время переходного процесса).
Расчет переходных процессов произведем в программе Matlab в приложении Simulink.
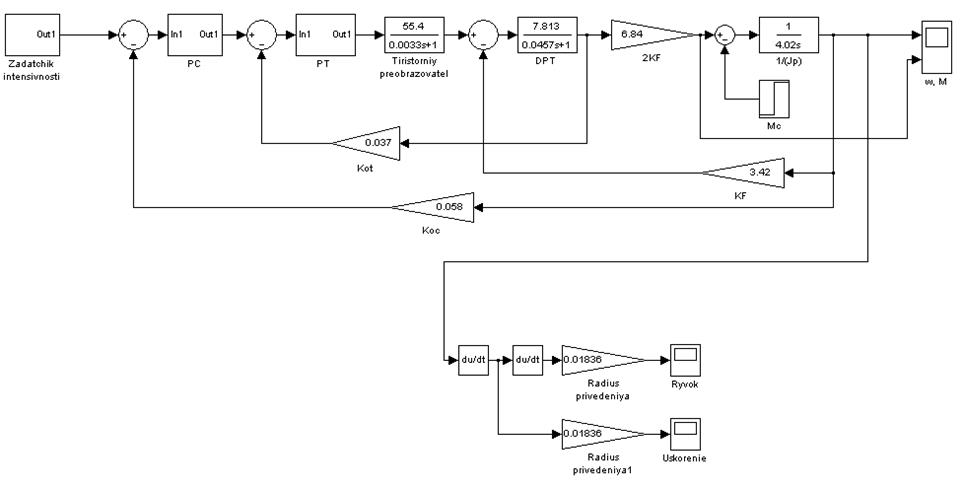
Рис.8. Фрагмент программы Matlab: структурная схема системы автоматического управления электроприводом пассажирского лифта.
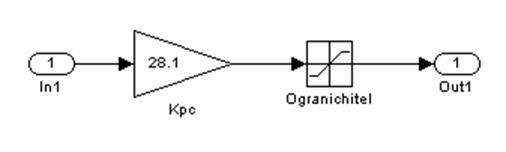
Рис.9. Фрагмент программы Matlab: регулятор скорости,
синтезированный на технический оптимум.
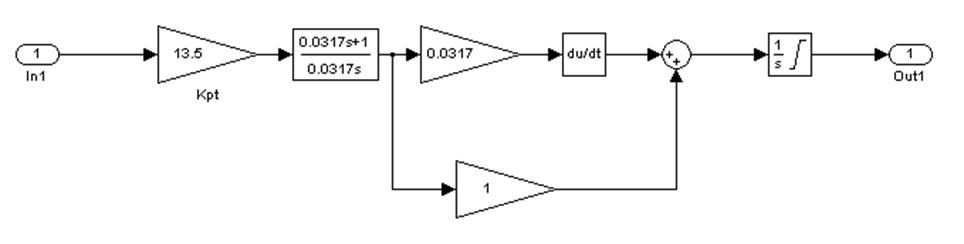
Рис.10. Фрагмент программы Matlab: регулятор тока,
синтезированный на технический оптимум.
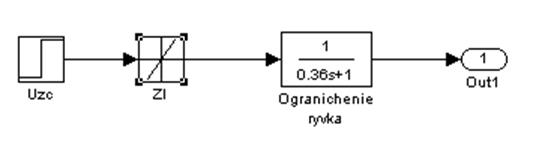
Рис.11. Фрагмент программы Matlab: задатчик интенсивности
с апериодическим звеном для ограничения рывка.
Построим переходные процессы момента двигателя М(t) и угловой скорости ω(t). Построение переходных процессов «в малом» выполняется для определения качества переходных процессов, поэтому выполним его без задатчика интенсивности и ограничения рывка.
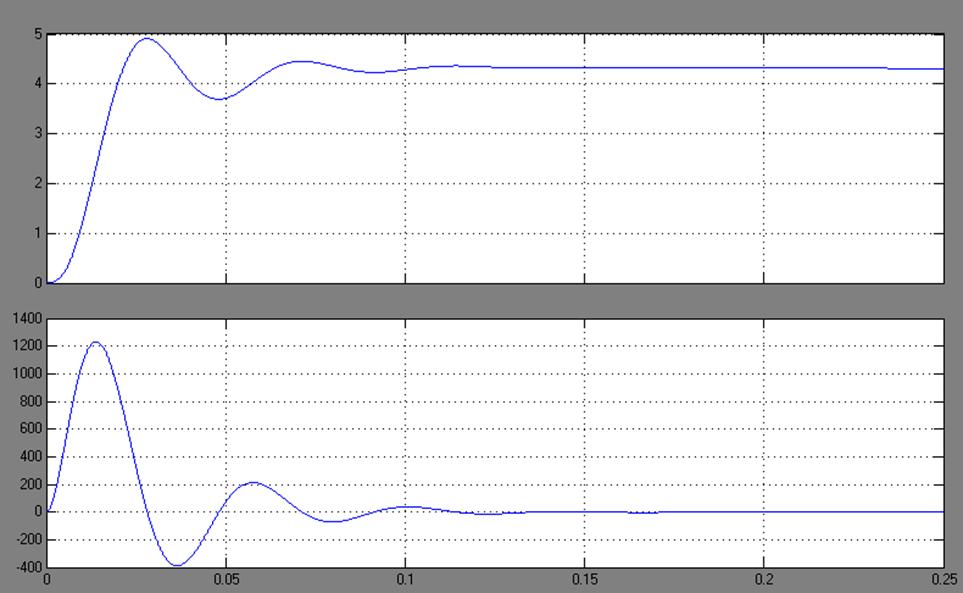
Рис.12. Фрагмент программы Matlab: переходные процессы при Uз = 0,25 В.
При синтезе регулятора скорости на технический оптимум быстродействие контура скорости равно:
tрег = 8,4·Тμω = 8,4 · 6,66·10-3 = 56 мс
Анализируя переходной процесс, видно, что быстродействие контура:
tрег = 150 мс
Анализ переходных процессов «в большом» выполним с задатчиком интенсивности и апериодическим звеном для ограничения рывка.
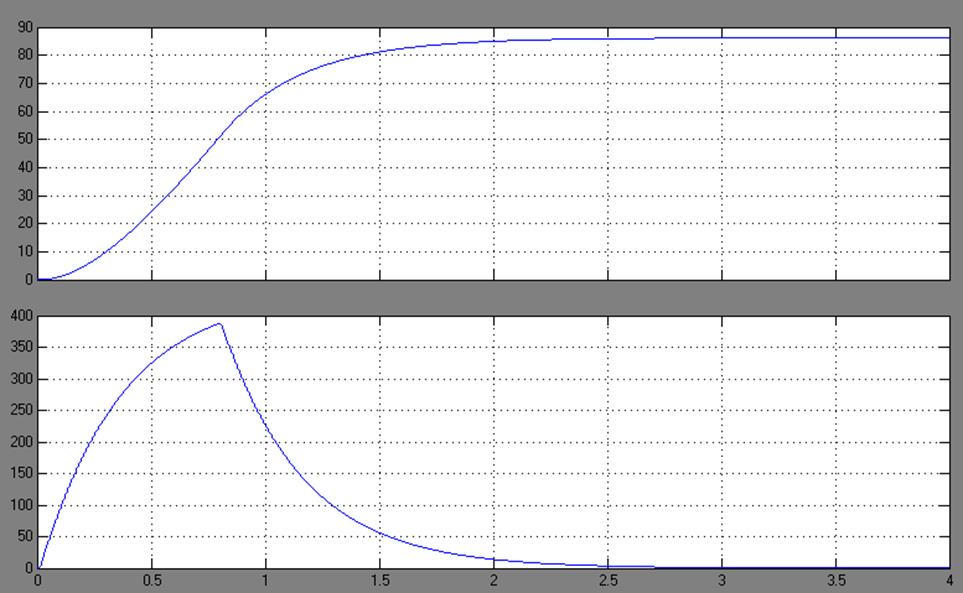
Рис.13. Фрагмент программы Matlab: переходные процессы при Uз = 5 В.
Как видно из переходных процессов, время переходного процесса составляет tрег = 3 с. Такое время переходного процесса обеспечивается тем, что задатчиком интенсивности ограничивается ускорение лифта, а апериодическим звеном ограничивается рывок. Графики изменения ускорения и рывка представлены на рис.14 и рис.15.
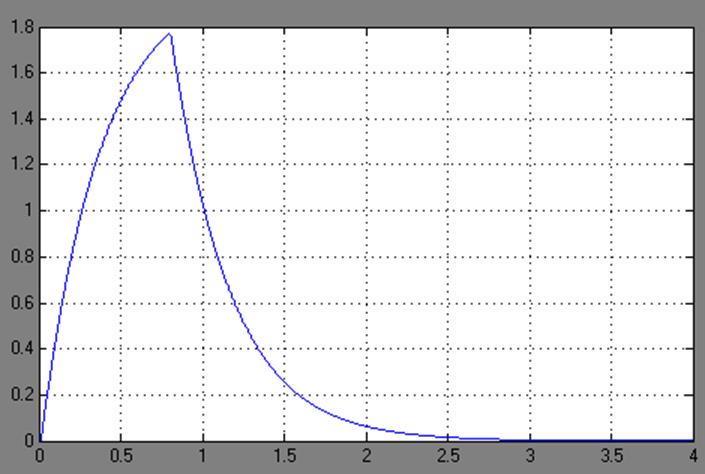
Рис.14. График изменения ускорения во времени.
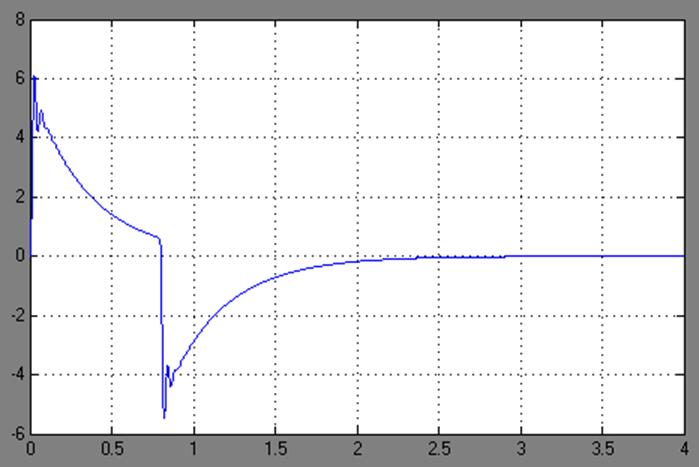
Рис.15. График изменения рывка во времени.
8. Синтез и расчет узлов ограничений и защит.
При синтезе системы автоматического управления за основу берем схему электропривода КТЭ. В качестве системы защит возьмём узел защиты данного электропривода.
Система защит и сигнализации осуществляет следующие виды защит:
1) Защита от внутренних коротких замыканий при выходе из строя тиристоров осуществляется путем блокировки управляющих импульсов по сигналу срабатывания герконовых датчиков на стороне переменного тока и отключения автоматических выключателей.
2) Защита при превышении мгновенного значения тока осуществляется с помощью электронной токовой защиты совместно с автоматическим выключателем. Электронная токовая защита обеспечивает достаточное быстродействие, сдвигая импульсы управления силовых тиристоров в инверсную область с последующим их блокированием. Сигналы токовой защиты поступают с герконовых и полупроводникового датчиков. Настройку уставки герконовых датчиков необходимо производить сначала на стороне постоянного тока, а затем переменного тока при рабочем напряжении главных цепей и отключенном датчике тока S402A (А22).
3) Защита при аномальных режимах в сети собственных нужд реализована на ячейке ключей № 501В. При аномомальных режимах в сети собственных нужд, например таких как снижение напряжения собственных нужд более чем на 15% от номинального, обрыве фазы, сигнал с выхода ячейки № 501В поступает на вход ячейки памяти № 617, где происходит формирование общего аварийного сигнала, воздействующего на откключение привода КТЭ.
4) Защита при опрокидывании и прорыве инвертора.
5) Защита при появлении уравнительных токов.
6) Защита при неисправности источника стабилизированного напряжения
7) Защита при аварийной перегрузке тиристоров по среднеквадратичному току. Для данной защиты используется сигнал с датчика тока S402A. Защита собрана на ячейке защиты от перегруза № 314. При достижении током КТЭ значения 1,5·Iн с выдержкой времени происходит аварийное отключение КТЭ по каналу среднеквадратичной токовой перегрузки тиристоров.
8) Защита при превышении или при снижении ниже допустимого уровня тока возбуждения электродвигателя. Она собрана на пороговых устройствах №501В, №311. Уставки срабатывания защит регулируются переменными резисторами R24, R32 ячеек №501В и №311 соответственно, таким образом, чтобы срабатывание защиты происходило при превышении тока возбуждения выше 1,25·Iн и при снижении тока возбуждения ниже 0,7·Iн.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.