Введение
Для будущего автоматизированного предприятия характерен ограниченный контингент операторов, техников и инженеров по контролю качества, осуществляющих проверку состояния производства. За режимом и условиями работы наблюдают датчики. Через каналы данных они отсылают информацию непосредственно программируемым микропроцессорам, которые обрабатывают информацию и отсылают исполнительные команды обратно без взаимодействия с человеком.
Пока на предприятиях датчики не заменили людей в качестве основных сборщиков информации, но в настоящее время уже существует технологии, позволяющие выполнять с их помощью почти все необходимые измерения. По мере возрастания степени автоматизации будет осуществляться переход от отдельных датчиков к контурам: датчик – управляющий орган – исполнительный механизм. Определена тенденция на создание сложных взаимодействующих между собой групп датчиков, подчиненных ЭВМ.
В данном курсовом проекте рассматривается датчик, используемый для контроля угла поворота механизма и построенного на основе фотоэлектрического датчика.
1. Разработка функциональной схемы цифрового датчика угла поворота
Функциональная схема цифрового датчика угла поворота представлена на рис. 1.1. Она содержит следующие функциональные узлы:
ФД – фотодатчик
СВИ – схема выделения импульсов
БФСС – блок формирования сигналов счета
ДЧ – делитель частоты
СДР – счетчик десятков разряда
ДДР – дешифратор десятков разряда
СЕР – счетчик единиц разряда
ДЕР – дешифратор единиц разряда
СДК – счетчик двоичного кода
ЦАП – цифро-аналоговый преобразователь
Работает схема следующим образом. Импульсы, сформированные ФД1 и ФД2, подаются на СВИ (схему выделения импульсов) на формирование положительного или отрицательного значения угла поворота. Положительное значение угла – выход Uвых, π. Отрицательное значение – выход Uвых, -π. На первом выходном канале импульсы Uвых, π появляются при таком направлении вращения, при котором сигнал U2 опережает по фазе π/2 сигнал U1 и элемент совпадения U1 открыт для импульсов Uвых, 1. При другом направлении вращения, когда U2 отстает по фазе на π/2 от U1 элемент совпадения U2 открыт для импульсов Uвых, 2, которые поступают на второй выходной канал Uвых, 0. В зависимости от сигналов Uвых, π или Uвых, -π на входе триггера Т он на выходе Q формирует сигнал логической единицы (положительное значение угла поворота), или сигнал логического нуля (отрицательное значение угла поворота).
Фотодатчик ФД3 начинает работать, когда начинается измерение отрицательного угла поворота. Импульс пришедший на ФД3 переведет триггер Т2 в нулевое состояние (состояние низкого логического уровня “0” на выходе Q). При измерении положительного угла поворота на выход триггера Т2 высокий логический уровень “1”.
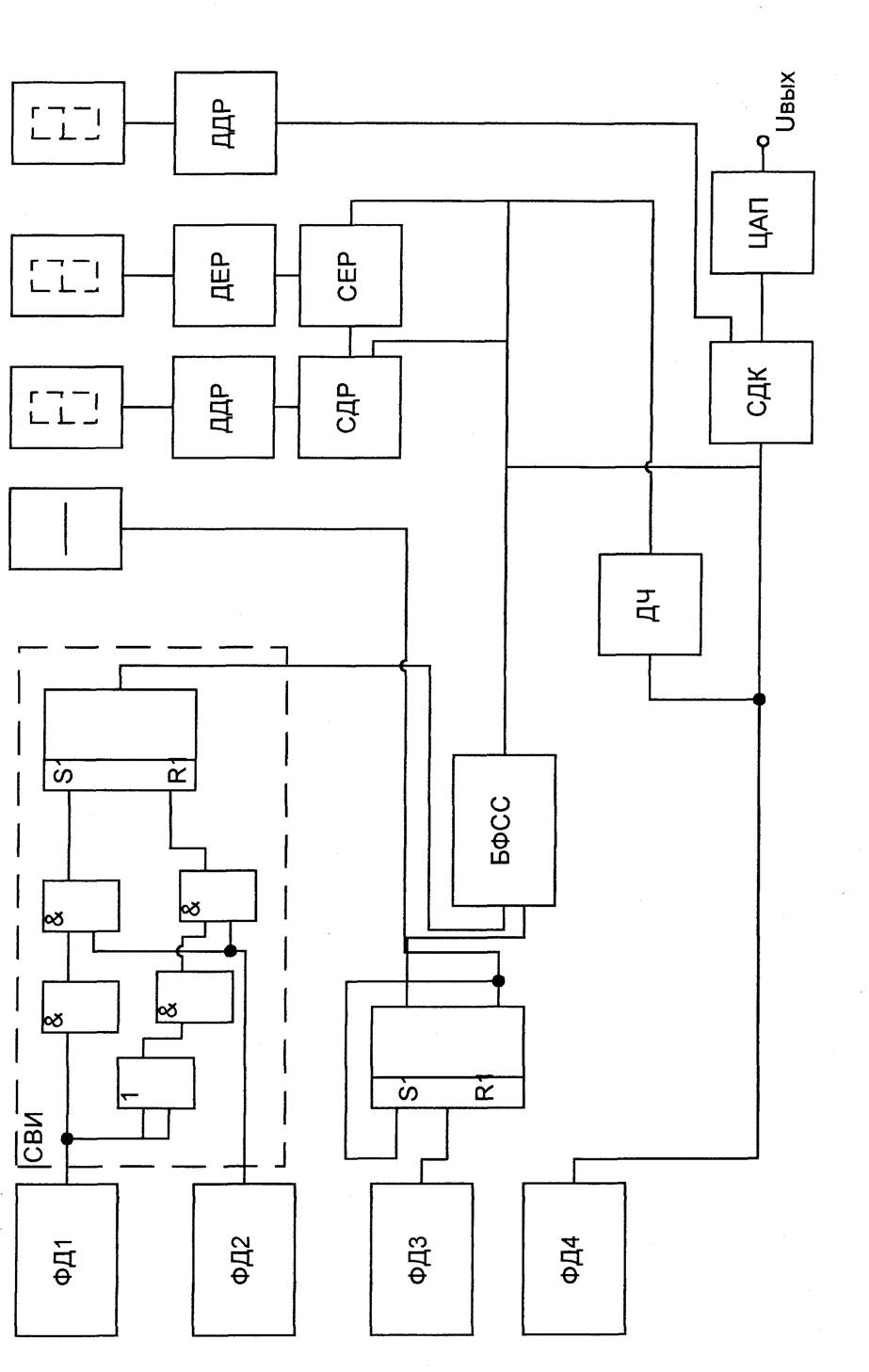
С выходов триггеров Т1 и Т2 сигналы подаются на блок формирования сигнала счета БФСС, который суммируя эти два сигнала выдает на выходе сигнал ±1, который служит разрешением для СДР, СЕР и СДК на изменение направления счета. При высоком логическом уровне на выходе БФСС счетчики считают на увеличение, при логическом уровне “0” на уменьшение.
Фотодатчик ФД4 выдает на выходе импульсы (рис. 1.1), которые поступают на СДК и ДЧ. СДК считает пришедшие на его вход импульсы и выдают их значение в двоичном коде на выходе. Двоичный код поступает на ЦАП, который преобразует его в аналоговый сигнал на своем выходе соответствующий определенному углу. Импульсы, пришедшие на ДЧ, делятся на два, после чего подаются на СДР и СЕР. Это два двоично-десятичных счетчика, которые соединены последовательно. После десятого импульса счетчик единиц разряда обнуляется (этот счетчик считает единицы измеряемого угла поворота). Счетчики СЕР и СДР соединены каждый со своим дешифратором ДЕР и ДДР, которые преобразуют двоичный код со счетчиков в семисегментный код для цифровых матриц.
Выход счетчика СДК соединен также с дешифратором десятков разряда угла поворота, который после дешифрации двоичного кода выдает код для семисегментной цифровой матрицы.
Выход Q триггера Т2 соединен со средним сегментом цифровой матрицы, который индуцирует знак минус при отрицательном угле поворота датчика.
2. Расчет отдельных узлов и основных элементов схемы
Представленный на рис. 2.1 фотодатчик предназначен для точного определения исходного или любого другого положения движущегося диска. Основным элементом датчика является фотодиод VD2 и логический элемент DD 14.1. Если шторка диска не прерывает излучение светодиода VD1, то фотодиод VD2 находится в фотогенераторном режиме. При этом он вырабатывает на своих выводах отрицательную ЭДС около 0,2 – 0,4 В. Поскольку резистор R5 имеет большое сопротивление (1 МОм), то напряжение на выходе 3 инвертора DD 14.1 способствует высокому логическому уровню. При затемнении светодиода VD2 шторкой выход элемента DD 14.1 переходит в состояние логического нуля. Это происходит за счет того, что темповое сопротивление фотодиода VD2 очень велико (~ 10 МОм).
Для повышения помехоустойчивости и четкости срабатывания датчика на очень низких скоростях перемещения, а также в условиях повышенных вибраций, можно использовать данный датчик.
Рассмотрим работу датчика в цикле подхода и ухода шторки, подвергнутой вибрациям, к заданной точке. При этом форма сигнала в точке А может меняться по кривой приведенной на рис. 2.2

Рис. 2.1. Принципиальная схема фотодатчика
В момент времени t1 (точка 1) триггер Шмита переключается в состояние высокого логического уровня. Несмотря на то, что сигнал в точке А в последующий моменты времени может стать несколько ниже первоначального уровня срабатывания (например, точка 3), триггер Шмита, благодаря наличию гистерезисной петли, не вернется в исходное положение (гистерезисную петлю датчика можно построить с помощью резисторов R6 и R7). Возврат в нулевое состояние произойдет лишь тогда, когда сигнал в точке А достигнет определенного уровня, так называемой точки отключения (точка 2).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.