При одновременной фиксации обеих аварийных ситуаций более приоритетным является нарушение по температуре, т.е. система должна действовать сначала по пункту контроля температуры.
Одна из основных функций логического управления заключается в том, что ЦТП должен быть остановлен оператором только по завершении полного технологического цикла.
Требования к функции контроля
Функция контроля включает следующие действия:
а) ввод текущих сигналов от датчиков и уровня напряжения, пересчет их в естественные единицы измерения (масштабирование) и получение значений технологических переменных по соответствующим формулам:
б) предельный контроль технологических переменных по условиям:
в) усреднение переменных в фазе "Процесс";
г) формирование и распечатка отчетного протокола с указанием средних значений переменных в фазе "Процесс" и количественных характеристик АСТД;
д) выдача сообщений о выходе технологических переменных за допустимые пределы.
Интервал опроса датчиков в нормальных ситуациях должен составлять 1-3 мин., в аварийных - не более 30 с. и в фазе "Загрузка" - не менее 30 с.
В отчетном протоколе должны фиксироваться имевшие место аварийные ситуации раздельно по фазам "Загрузка" и "Процесс".
При формировании ЦТП современная технология позволяет применять по выбору одну из двух стратегий проектирования [14]: информационную и процедурную. В первом случае проектирование начинают с определения структур данных, во втором - логической структуры системы. Стратегия проектирования выбирается в зависимости от вида доминирующих функций АСУ ЦТП.
При преобладании информационных функций, состав и последовательность выполнения которых слабо зависит от состояния технологического объекта управления или вмешательства оператора-технолога, предпочтительней начинать с информационной декомпозиции постановки задачи.
При наличии функций логического управления и при сильной зависимости состава выполняемых функций от хода ЦТП, а также в случае интенсивного диалога оператора с системой управления задача проектирования решается проще методами процедурной декомпозиции. Процедурная декомпозиция требует больших интеллектуальных усилий, однако, она более адекватна специфике АСУ ЦТП как системе реального времени и поэтому более предпочтительна в общем случае.
В АСТД тягового подвижного состава информационные функции имеют доминирующее значение, поэтому на первом этапе используется информационная стратегия формирования ЦТП [16].
1.1.2. Анализ процедур формирования ЦТП
Рассмотрим процедуры проектирования в их логической последовательности.
Проектирование функций
Источниками исходных данных (ИД) для процедуры являются результаты НИР и ТЗ на создание АСУ ЦТП. В результате процедуры получают корректное формальное описание функциональной структуры (ФС) АСУ ЦТП.
Состав операций процедуры представлен в таблице 1.1.1.
Таблица 1.1.1.
|
Анализ постановки задачи автоматизации |
Подготовка ИД о ФС |
Статический анализ ФС |
Изготовление документации |
Экспертиза проекта |
Рассмотрим эти операции подробнее. Целью операции "Анализ постановки задачи автоматизации" является разложение функций АСУ ЦТП по уровням принятия решений. Операция осуществляется в три этапа, соответствующие трем уровням детальности описания функций:
- определение структуры принятия решений;
- определение структуры функциональных подсистем;
- декомпозиция функциональных задач.
Для декомпозиции общей постановки задачи на иерархически подчиненные слои (уровни принятия решений) удобен метод временных горизонтов [14]. Под временным горизонтом понимают интервал времени, в течении которого компоненты нижележащего уровня отрабатывают решение, принятое компонентом вышележащего уровня.
Временной горизонт может характеризоваться постоянной времени объекта регулирования, периодом планирования производства и т.п. Классификация функций по значению временного горизонта приводит к расчленению АСУ ЦТП на уровни, которым соответствуют определенные диапазоны. Уровни с большим значением диапазона считаются верхними. На рис. 1.1.1 дана типовая структура такого разложения, где иерархии уровней принятия решений соответствует декомпозиция целей автоматизации ОУр.
Этап определения структуры функциональных подсистем можно охарактеризовать следующим образом: состав подсистем уровней Ф1, Ф2 определяется в основном технологической структурой ОУр. Анализ также показывает, что подсистемы уровней Ф1 - Ф3 реализуют по отношению к ОУр и технологу-оператору принципиально однотипные задачи, которые можно свести к следующим классам: защита, автоматическое управление и регулирование, контроль, оперативное управление, оптимизация и т.д.
Третий этап декомпозиции постановки задачи автоматизации предназначен для детализации и конкретизации функциональных задач. Функциональная задача на этом уровне абстракции рассматривается как совокупность операций обработки сигналов. Типовая структура функциональной задачи показана на рис. 1.1.2. Она включает операции ввода, накопления, преобразования, отображения, вывода сигналов, связанные определенным образом.
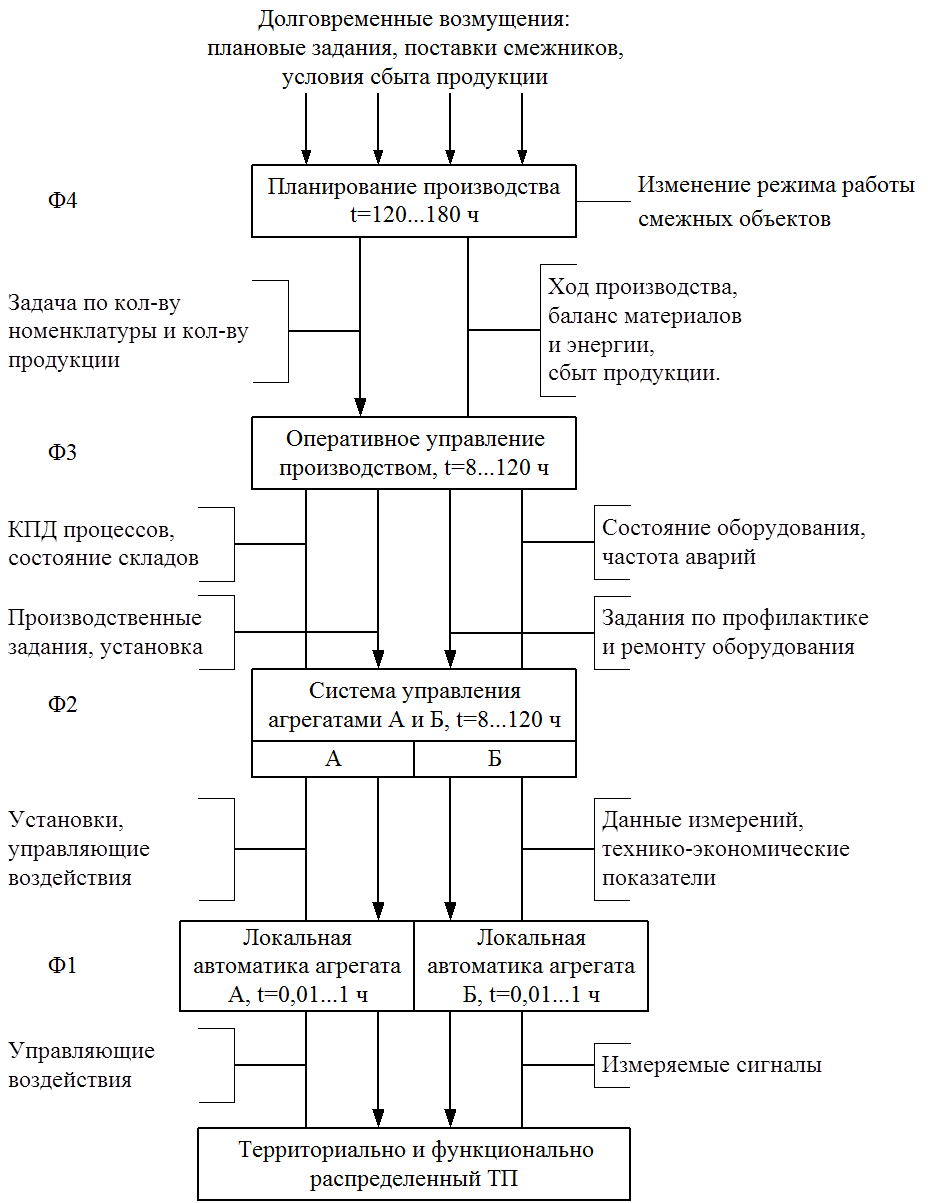
Рис.1.1.1 Иерархия уровней принятия решений
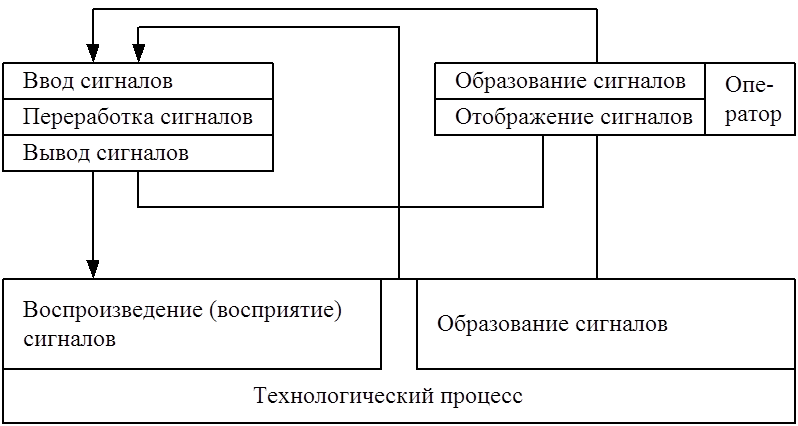
Рис.1.1.2 Типовая структура функциональной задачи
Для функциональной задачи характерны:
- законченность с технологической точки зрения, которая выражается в принадлежности к одному из классов функций (контролю, регулированию, управлению);
- полнота цикла обработки сигналов, которая выражается в том, что источником исходных данных для задачи и потребителем результатов ее решения является внешняя среда подсистемы, т.е. технологический объект, оператор или другие подсистемы.
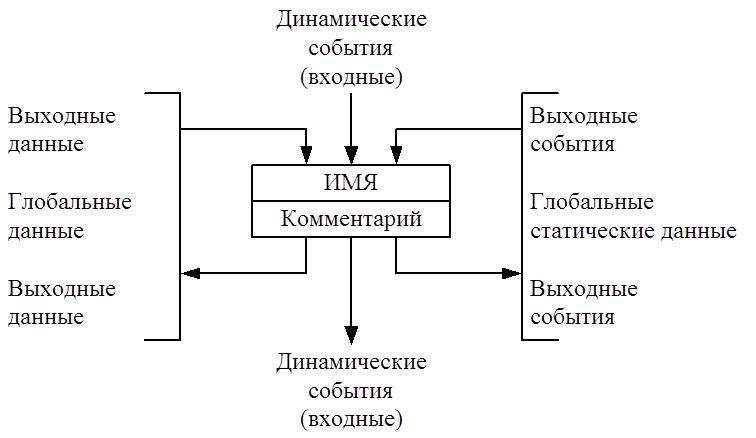
Рис.1.1.3 Функциональный блок
Операции, реализуемые функциональными блоками, приведенными на рис.1.1.3, можно сгруппировать в подсистемы автоматического и оперативного управления. Первая подсистема включает операции ввода, переработки и вывода сигналов. Вторая - операции отображения и образования сигналов. К технологическому объекту отнесены операции образования и восприятия сигналов, поскольку они выполняются датчиками и исполнительными органами, традиционно считающимися элементами технологического объекта управления (ТОУ).
Функциональные задачи с описанной структурой встречаются практически на всех уровнях иерархии принятия решений в автоматизированной системе. При этом структура конкретных задач может отличаться от типовой отсутствием отдельных функциональных блоков (операций) в зависимости от уровня и вида подсистемы.
Проиллюстрируем метод декомпозиции. Из постановки задачи следует, что функции системы управления распределяются между тремя временными горизонтами:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.