- знак плюс используется для обозначения арифметического действия вычитания или указания знака числа;
* знак умножить используется для обозначения арифметического действия умножения;
/ знак разделить используется для обозначения арифметического действия деления, а также для отделения главного слова от дополнительных;
, запятая используется для разделения дополнительных элементов, описанных справа от косой черты в операторе. Например: Т2=Т/ПР0, ПР6, ПР10;
. разделитель точка используется для отделения целой части от дробной при записи чисел;
= знак равенства используется в операторах присвоения;
¤ знак “солнышко” используется в качестве знака переноса, т.е. указывает, что следующая строка является продолжением оператора, начало которого расположено на предыдущей строке;
¤¤ знак ”двойное солнышко” используется для указания начала пояснительного текста, включаемого в ИП;
( ) левая и правая круговые скобки используются для тех же целей, для каких они применяются в обычных математических выражениях.
В исходной программе, записанной на языке АПТ СМ, используются только вещественные (или действительные) числа, у которых пробная часть отделена от целой разделителем “точка”.
3-5
Все слова данного языка подразделяются на главные и дополнительные. Главные слова определяют тип переменной и применяются в правой части операторов перед символом “косая черта”. Дополнительные слова помещают за косой чертой для уточнения переменной в случае неоднозначности её определения.
С помощью главных слов определяются следующие типы переменных: геометрические величины и поверхности (например, Т, ПР, ПЛ, ОКР); стандартные функции; операторы постпроцессором (ШПИНД, ОХЛ, ПОДАЧА); операторы перемещения (ИДИ, ПРИРАЩ); параметры обработки.
Дополнительные слова (модификаторы) применяются обычно в качестве определителей или селекторов. Имеются модификаторы:
БОЛЬШЕ;
ВН – внутри;
ВРАЩХУ – вращение в плоскости ХОУ;
ЗЕРК – зеркальное отражение;
КАС – касательно;
МАСШТ – масштаб;
МЕНЬШЕ;
НАР – снаружи;
ПО – по точку, следующую за этим модификатором;
ПРЛ – параллельно;
ПРП – перпендикулярно;
ПРС – пересечение;
РАСТ – расстояние;
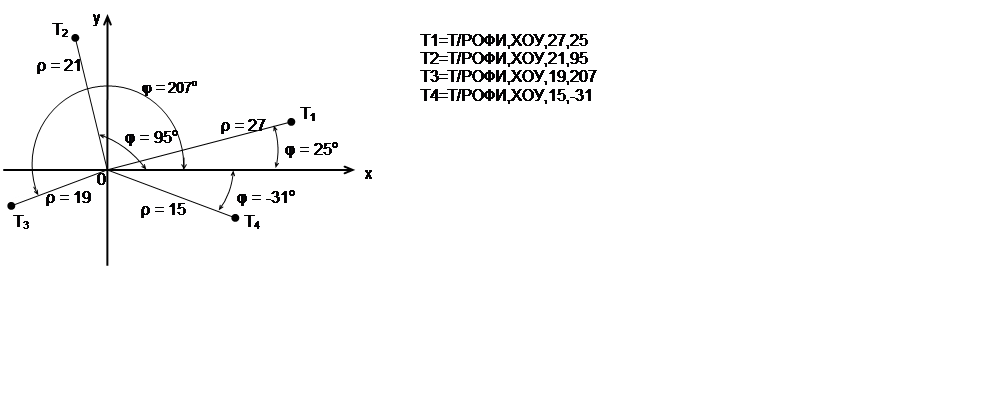
РОФИ – координаты;
СДВИГ;
СЛ – слева;
СЛОЖН – сложное;
СПР – справа;
УБ – У больше;
УГ – угол;
3-6
УМ – У меньше;
ХБ – Х больше;
ХМ – Х меньше;
ХОУ – плоскость ХОУ;
ЦТР – центр.
В системе АПТ СМ имеется возможность определять следующие геометрические элементы:
точка – Т;
вектор – ВЕКТ;
прямая – ПР;
окружность – ОКР;
плоскость – ПЛ;
матрица преобразования – МАТ;
упорядоченное множество точек – УМТ;
обрабатываемый контур – КОНТ.
После каждого геометрического элемента указано написание соответствующего слова на языке АПТ СМ.
Операторы преобразования траектории позволяют осуществлять сдвиг, поворот, зеркальное отображение и масштабирование произвольных частей траектории движения инструмента.
Операторы движения позволяют описывать как позиционное движение (из точки в точку), так и перемещение вдоль контуров, состоящих их отрезков прямых и дуг окружностей.
Оператор ИЭ указывает нулевое положение инструмента, т.е. координату вершины инструмента ( точка пересечения оси фрезы с плоскостью её рабочего торца) перед началом обработки детали. Этот оператор должен быть задан в ИП
3-7
только один раз, перед первым оператором движения. Выполнение оператора ИЗ не вызывает никого движения инструмента. Оператор имеет вид ИЗ/Х,У,Z величина подачи.
Оператор абсолютного перемещения ИДИ используется для задания перемещения инструмента из его последнего положения в указанную в абсолютных координатах точку. Оператор ИДИ имеет вид: ИДИ/Х,У,Z, величина подачи.
Оператор перемещения по приращению ПРИРАЩ указывает на движение в относительной системе координат (по приращению). Оператор имеет вид: ПРИРАЩ/ΔХ, ΔУ, ΔZ, величина подачи.
Операторы управления постпроцессором с параметрами
Операторы КОРИН используются для формирования команды на включение устройства коррекции траектории движения инструмента. Существует 4 способа задания этого оператора:
- когда указывается номер корректирующего устройства. В этом случае оператор имеет вид: КОРИН/номер декадного переключателя;
- когда указывается направление и величина смещения траектории от обрабатываемого контура. В этом случае оператор имеет вид: КОРИН/СЛ, величина смещения или КОРИН/СПР, величина смещения;
- когда указывается максимально допустимая величина смещения инструмента, номер корректирующего устройства и необходимая скорость перемещения. Оператор имеет вид: КОРИН/СПР, номер декадного переключателя, величина подачи, максимально допустимая величина смещения;
- когда отменяется указание на введение коррекций. Оператор имеет вид: КОРИН/ВЫКЛ.
3-8
Таблица 1
Способы определения точки
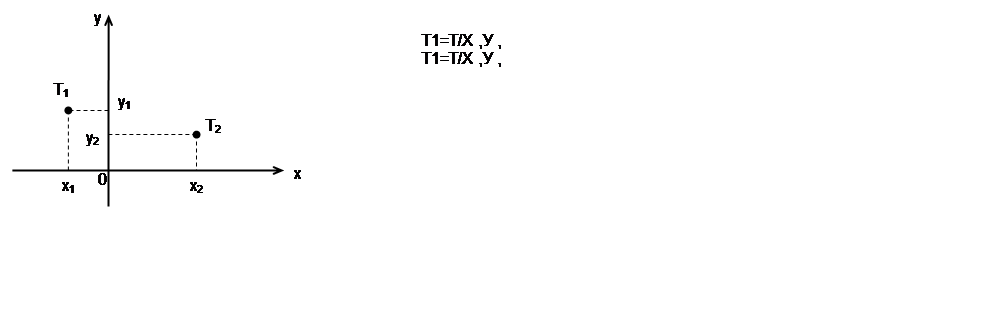
1. Точки, определяемые прямоугольными координатами.
 2.
Точки, определяемые полярными координатами.
2.
Точки, определяемые полярными координатами.
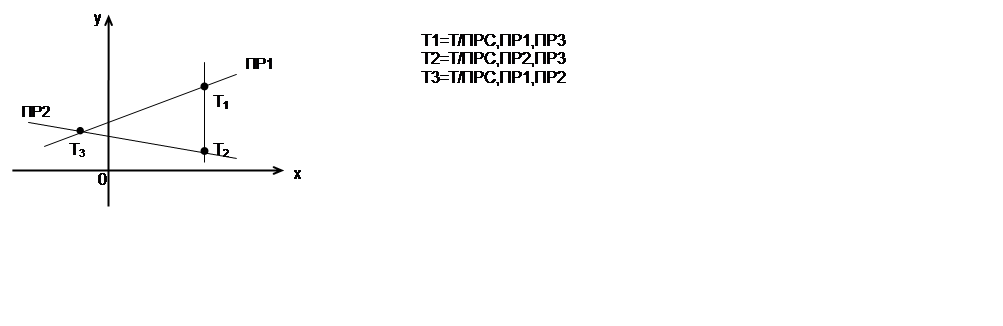
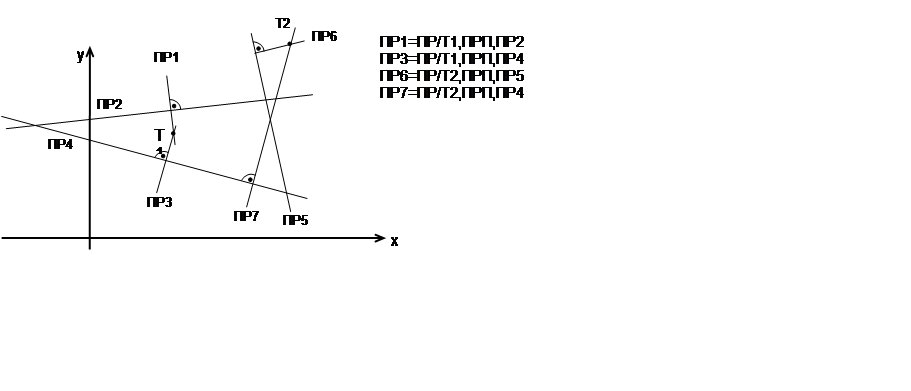
3. Точки, определяемые пересечением двух прямых.
|
 3-9
3-9
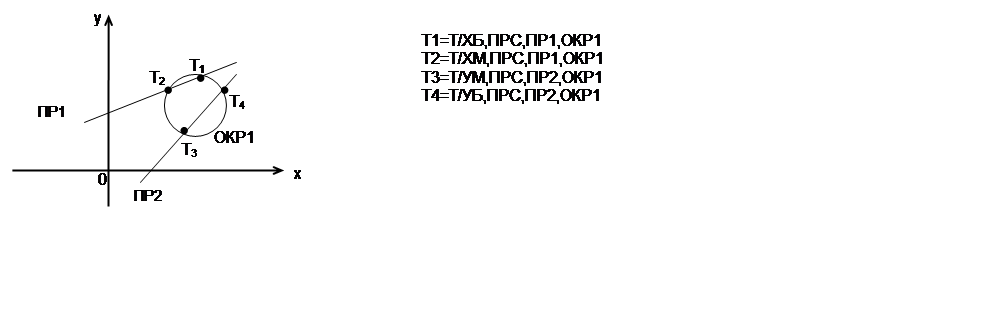
4. Точки, определяемые пересечением прямой с окружностью.
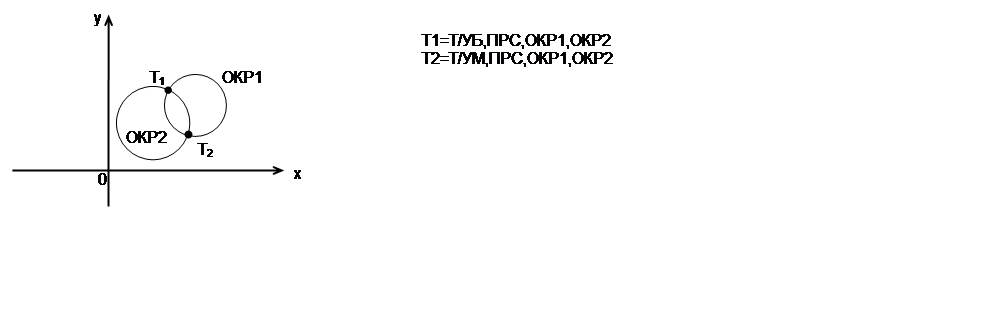
5. Точки, определяемые пересечением двух окружностей.
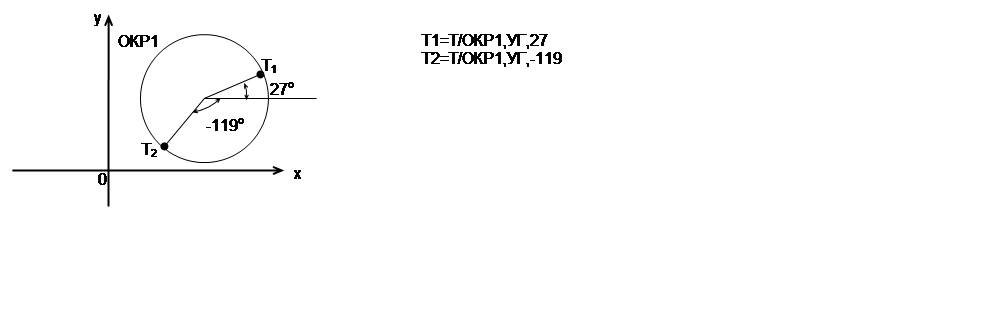
6. Точки на окружности, определяемые значением центрального угла.
3-10
Таблица 2
Способы определения прямой.
1. Определение прямых, проходящих через две точки.
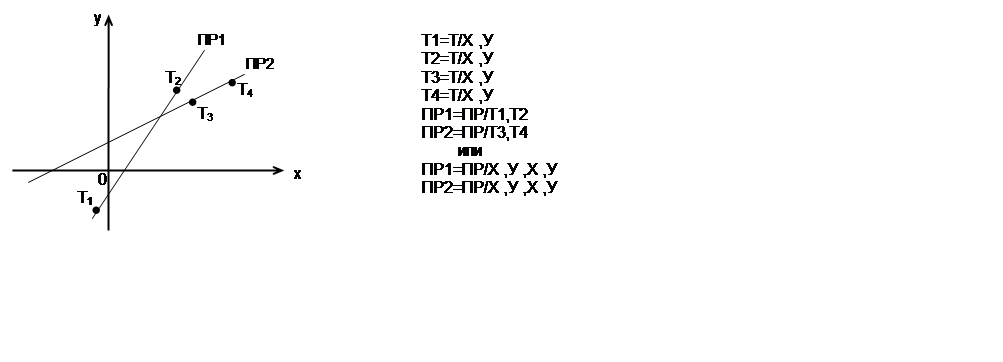
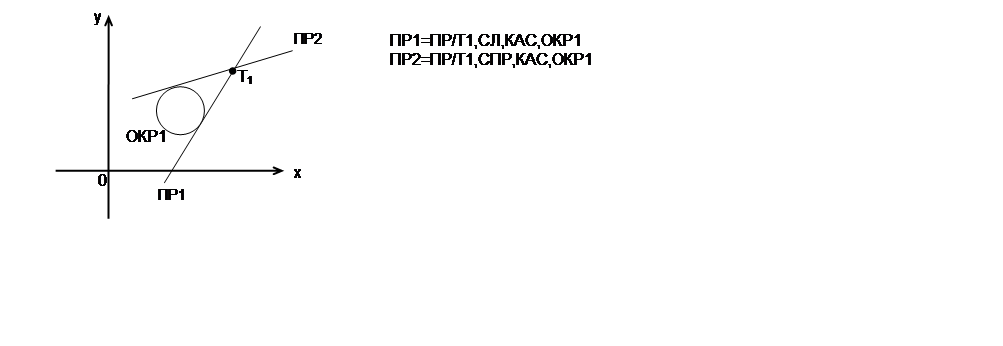
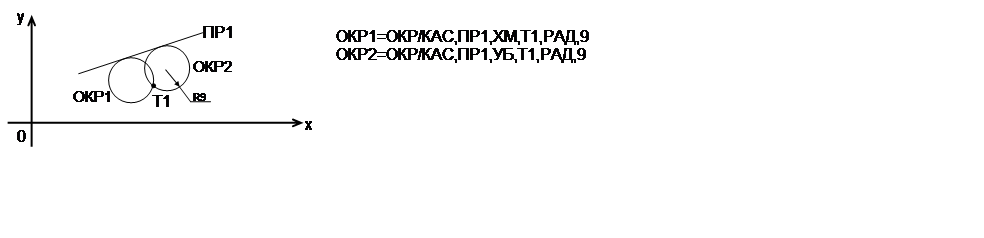
2. Определение прямых, проходящих через две точку касательно к окружности.
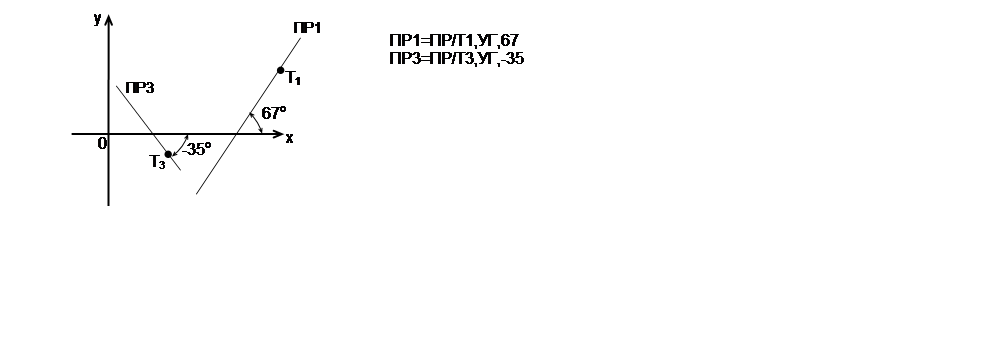
3. Определение прямых, проходящих через точку под заданным углом
к оси Х.
 3-11
3-11
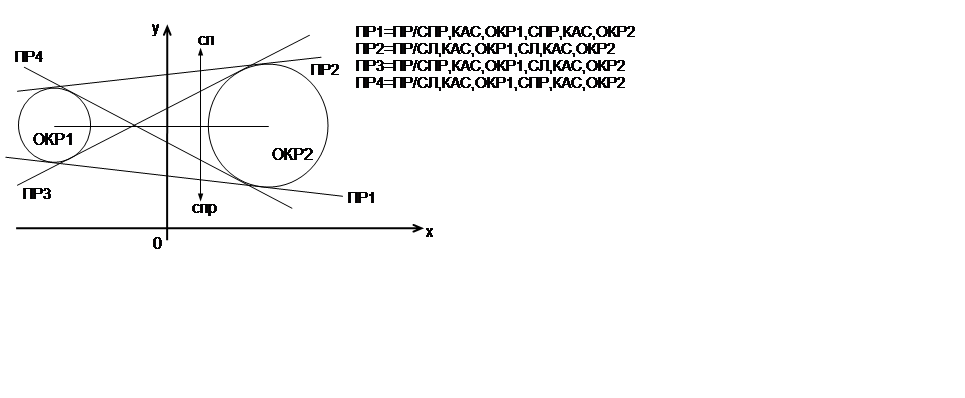
4. Определение прямых, касательных к двум окружностям.
5. Определение прямых, проходящих через точку перпендикулярно к заданной прямой.
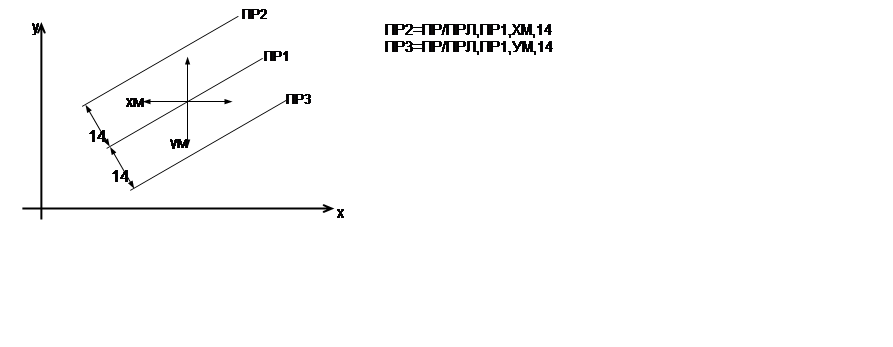

 6. Определение прямых,
параллельных другой заданной прямой.
6. Определение прямых,
параллельных другой заданной прямой.

 3-12
3-12
Таблица 3
Способы определения окружности
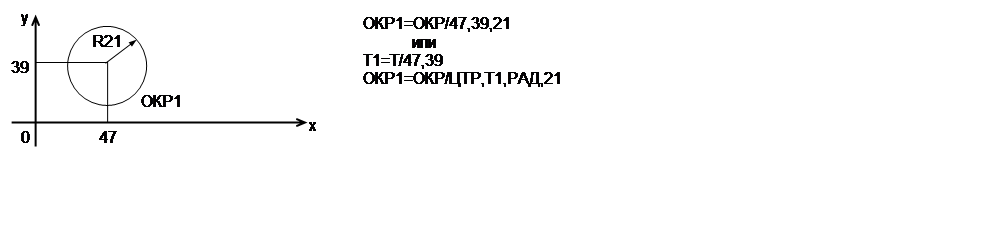
1. Определение окружности центром и радиусом.
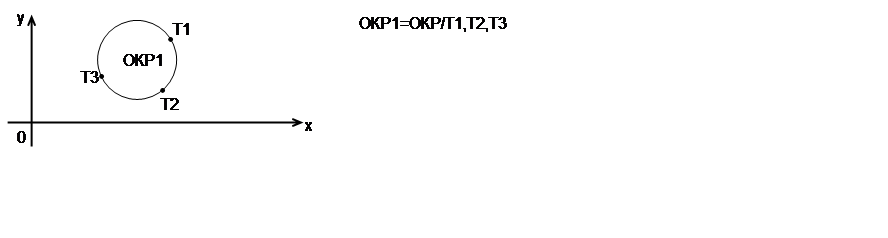
2. Определение окружности, проходящей через три точки.
3. Определение окружности, заданного радиуса, касательной к двум пересекающимся прямым.
4. Определение окружности, заданного радиуса, проходящей через точку и касательной к прямой.
 3-13
3-13
5. Определение окружности, заданного радиуса, касательных к прямой и другой заданной окружности.
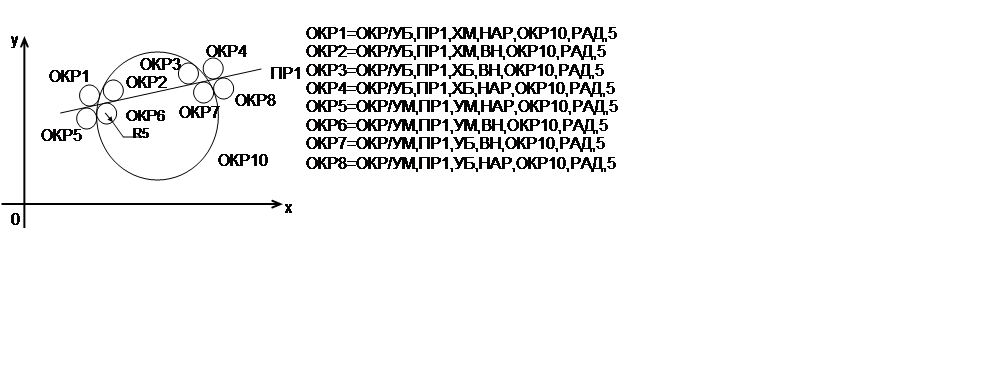
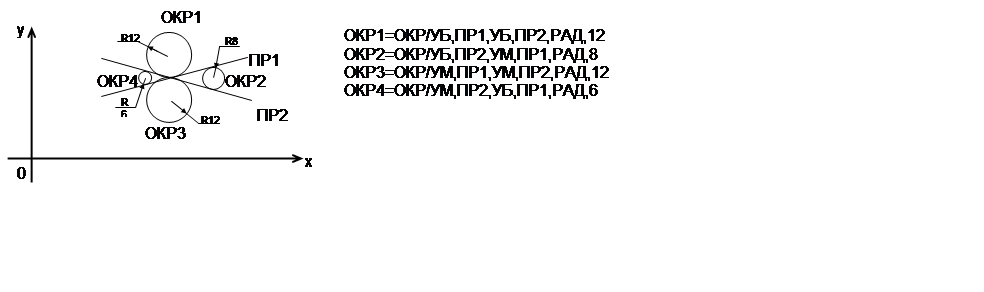
6. Определение окружности, заданного радиуса, касательных к двум другим окружностям.
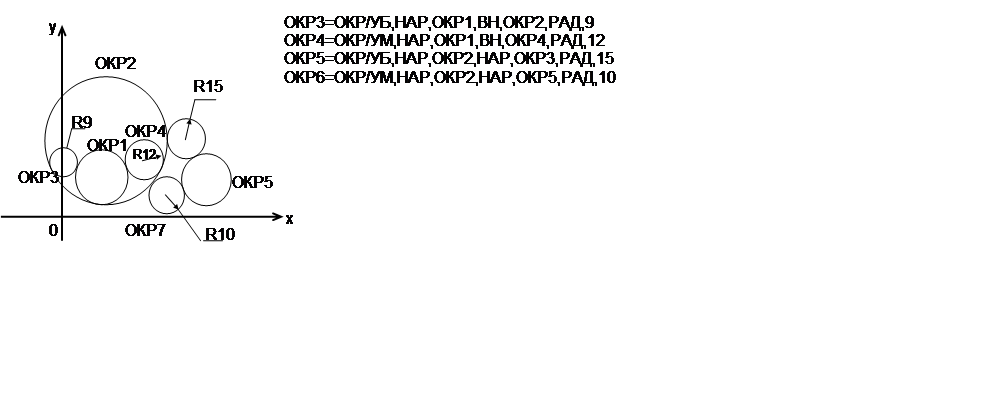
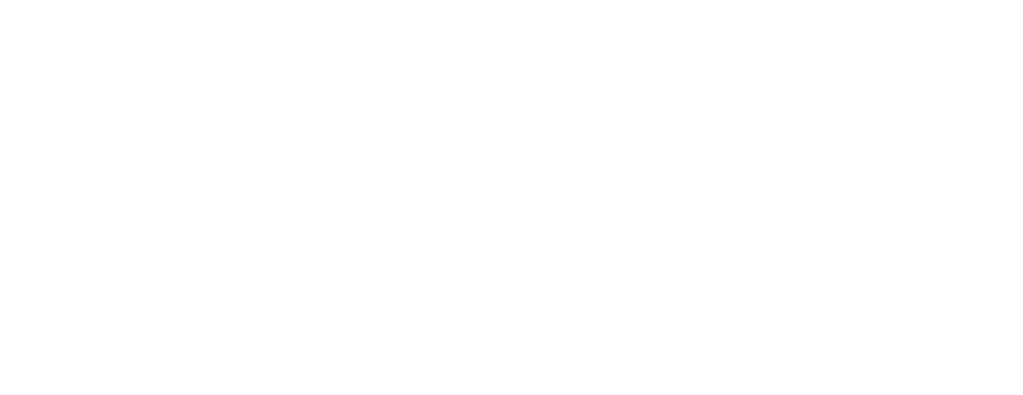
7. Определение окружности с центром в заданной точке, касательных к заданной окружности.
3-14
1.3.4. Пример подготовки управляющей программы с применением
системы автоматизированного программирования АПТ СМ
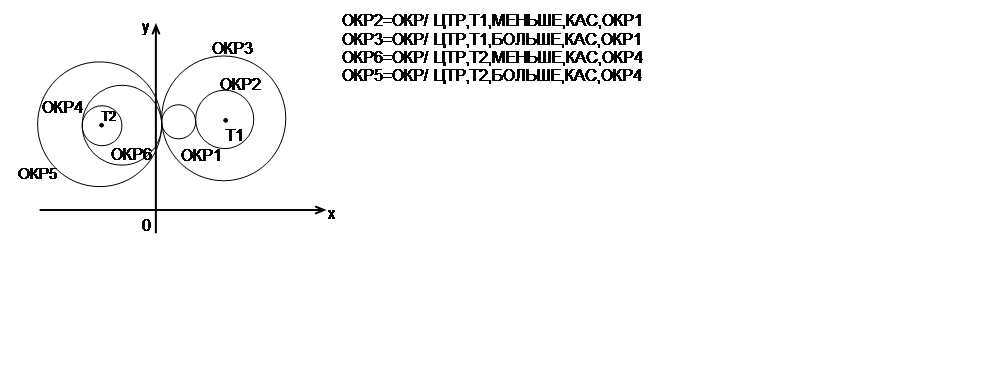
Рис.3.1. Чертёж кулачка
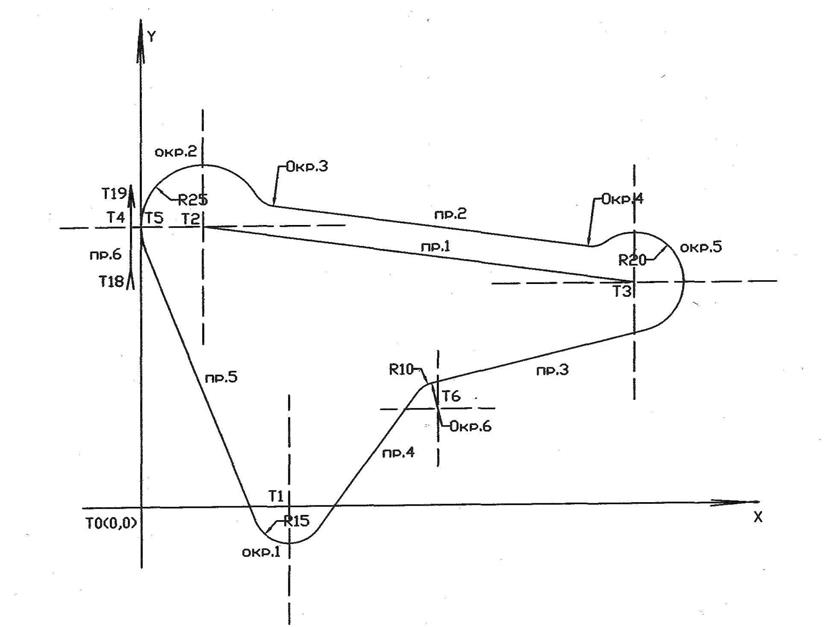
Рис. 3.2. Определение геометрических элементов, составляющих контур детали и присвоение им имён
3-15
Исходная программа для расчета заданного профиля детали на ЭВМ с использованием системы автоматизаиии программирования «АПТ СМ»:
1 Деталь учебная
2 Т0 = Т / 0, 0, 200
3 T1 = T / 60, 0
4 T2 = T/ 25, 115
5 T3 = T/ 200, 95
6 T4 = T/ -9, 115
7 T5 = T/ 0, 115
8 T6 = T/ 120, 40
9 T18 = T/ -9, 95
10 T19 = T/ -9, 135
11 ОКР1 = ОКР / ЦТР, T1, РАД, 15
12 ОКР2 = ОКР / ЦТР, T2, РАД, 25
13 ОКР5 = ОКР / ЦТР, T3, РАД, 20
14 ОКР6 = ОКР / ЦТР, T6, РАД, 10
15 ПР6 = ПР / Т18, УГ, 90
16 ПР1 = ПР / Т2, T3
17 ПР2 = ПР /ПРЛ,ПР1,УБ,12
18 ПРЗ = ПР / СЛ, КАС, ОКР5, СПР, КАС, ОКР6
19 ПР4 = ПР / СПР, КАС, ОКР6, СЛ, КАС, ОКР1
20 ПР5 = ПР / СЛ, КАС, ОКР1, СЛ, КАС, ОКР2
21 ОКРЗ = ОКР / УБ, ПР2, ХБ, НАР, ОКР2, РАД10
22 ОКР4 = ОКР / УБ, ПР2, ХМ, НАР, ОКР5, РАД10
23 ПОДАЧА/1200
24 ИЗ /Т0
25 КОРИН/СЛ,20
26 ИДИ/Т18
27 ПОДАЧА/250
28 ИДИ/Т4
29 КОНТ / Т5, ПОЧС, ОКР2, ХБ, ПРЧС, ОКРЗ, ПР2, ПРЧС, ОКР4, ПОЧС, * ОКР5, ПРЗ, ПРЧС, ОКР6, ПР4, ПОЧС, ОКР1, ПР5, ПОЧС, ОКР2, Т5
30 ИДИ/Т19
31 ПОДАЧА /1200
32 ПРИРАЩ / 0, 0, 200
33 ИДИ/Т0
34 КОНЕЦ
3-16
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.