Обслуживание запроса на прерывание
Внешние устройства выдают сигнал З. Пр. асинхронно по отношению к работе МП БИС путем подачи 1 на вх З.Пр.
Запрос может быть удовлетворен только в том случае если МП БИС находится в состоянии разрешения восприятия запросов на прерывание.
МП БИС автоматически устанавливается в режим запрета после выполнения начальной установки, а также после начала обслуживания З.Пр.
Управление состояния приема запроса прерывания осуществляется с помощью команды EI. МП БИС указывает на возможности приема прерывания на входе разрешения прерывания. Если на выходе присутствует 1, то запрос на прерывание может быть воспринят. В противном случае если 0, то не воспринимается.
Если запрос на прерывание воспринят то начинается цикл обслуживания прерывания.
На первом машинном цикле обслуживания прерываний МП БИС получает по магистрали данных микро ЭВМ код прерывания.
Существует 2 способа задания кода прерывания:
- с помощью команды RST <N>, которая означает прерыватель выполнение программы. N изменяется 0 – 7 – это номер уровня старта.
- CALL <A1> <A2> - векторный способ задания прерывания, означает не совпадение выступления цикла.
А1 – начальный адрес программы обслуживания прерывания
А2 – адрес точки останова.
Первый машинный цикл обслуживания прерывания для обоих способов является общим и отличается от цикла М1 тем, что содержание программного счетчика при этом увеличивается. На 1-м такте Т1 устанавливается 0-й уровень на выходе Р. Пр.
МП БИС информирует внешнее устройство о восприятии начала обслуживания прерывания, выдачи словосостояния с 1-го разряда D0, D1 и D5.
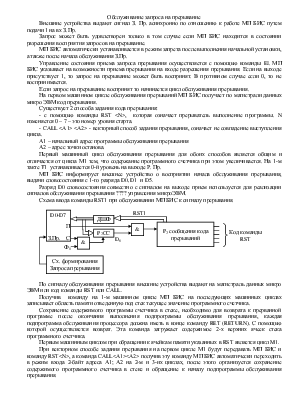
Разряд D0 словосостояния совместно с сигналом на выходе прием используется для реализации сигналов обслуживания прерывания ???? управления микроЭВМ.
Схема ввода команды RST1 при обслуживании МП БИС к сигналу прерывания.
По сигналу обслуживания прерывания внешние устройства выдают на магистраль данных микро ЭВМ или код команды RST или CALL.
Получив команду на 1-м машинном цикле МП БИС на последующих машинных циклах записывает область памяти отведенную под стек текущее значение программного счетчика.
Сохранение содержимого программы счетчика в стеке, необходимо для возврата к прерванной программе после окончания выполнения подпрограммы обслуживания прерывания, каждая подпрограмма обслуживания процессора должна иметь в конце команду RET (RETURN). С помощью которой осуществляется возврат. Эта команда загружает содержимое 2-х верхних ячеек стека программного счетчика.
Первым машинным циклом при обращении к ячейкам памяти указанных в RST является цикл M1.
При векторном способе задания прерывания на первом цикле М1 будут передавать МП БИС и команду RST<N>, а команда CALL<A1><A2> получив эту команду МП БИС автоматически переходить в режим входа 2-байт адреса А1; А2 на 2-м и 3-их циклах, после этого организуется сохранение содержимого программного счетчика в стеке и обращение к началу подпрограммы обслуживания прерывания.
При векторном способе задания прерывания внешнее устройство сообщает не только команду, но и адрес начала подпрограммы обслуживания прерывания.
Организация устройств ввода вывода информации
Асинхронный процесс обмена данными между микроЭВМ и внешним устройством а также требования наиболее рационального распределения времени работы микро ЭВМ приводят к необходимости разработки интерфейсных устройств при организации обмена данными.
Задача таких устройств состоит в приеме данных по сигналам управления.
Формирование данных, указывающих на готовность устройства к приему новой информации.
Технология БИС позволяет создавать универсальные многофункциональные интерфейсные устройства ввода-вывода параллельной информации.
Такие устройства могут быть программируемыми и применяться для двунаправленной передачи данных и сигналов управления.
МикроЭВМ информируется о готовности устройства к обмену данными по сигналам прерывания. Обмен данными осуществляется путем обращения микроЭВМ к устройствам вв/выв как к адресу памяти или внешнему устройству.
Программируемое устройство, используемое для вв/выв параллельной информации различного формата (КР580ВВ55)
(программируемый параллельный интерфейс) ПрПИ
![]()
![]()
![]()
![]()
![]()
ПрПИ позволяет осуществлять обмен 8-и разрядными данными по 3-м каналам (???) A, B, C и предназначен для применения в микропроцессорной системе в качестве универсального элемента вв/выв, обеспечивающего обмен данными в параллельном формате между микропроцессором и системами, в частности арифметическими устройствами.
Аналогичное назначение функции и структур имеет микросхема КР 580ИК55 и зарубежный аналог INTEL 8255.
Упрощенное изображение (цоклевка)
Таблица обозначения вводов.
|
№ выв |
Обозначение |
Наименование |
Назначение вывода |
Тип сигнала |
Состояние |
|
|
рус |
анг |
|||||
|
6 |
|
|
Выбор устройства (выбор шины) |
Используется для перевода МС в активное состояние, т. е. подключает ППИ к системной шине |
ВХ |
0 |
|
5 |
|
|
Чтение |
Вход, на который подается сигнал на выдачу данных из внутренних регистров ППИ на ШД |
ВХ |
0 |
|
36 |
|
|
Запись |
Сигнал записи данных в ППИ |
ВХ |
0 |
|
35 |
СБР |
RESET |
Сброс |
Начальная установка ППИ. При подаче сигнала на этот вход обнуляются регистры управления, триггеры разрешения прырываний, все каналы A, B, C устанавливаются в режим ввода данных |
ВХ |
1 |
|
9 |
А0 |
А0 |
Адрес порта |
Входы выбора одного из каналов A, B или С или регистра управления |
ВХ |
1/0 |
|
8 |
А1 |
А1 |
Адрес порта |
|||
|
34-27 |
Д0-Д7 |
D0-D7 |
Двунаправленная ШД |
Предназначен для передачи данных, управляющих слов и инд. состояния |
ВХ/ВЫХ |
1/0 |
|
4-1 40-37 |
КА0-КА7 |
PA0-PA7 |
Двунаправленная ШД канала А |
Предназначен для передачи данных, управляющих сигналов, сигналов запроса на прерывание от внешних устройств и МП БИС |
ВХ/ВЫХ |
1/0 |
|
18-25 |
КВ0-КВ7 |
PB0-PB7 |
Двунаправленная ШД канала B |
|||
|
14-17, 13-10 |
КC0-КC7 |
PC0-PC7 |
Двунаправленная ШД канала C |
|||
|
26 |
Uип |
Ucc |
Питание |
Питание +5 В |
||
|
7 |
Общ |
GND |
Общий |
Питание 0 В |
||
Схема может выполнять следующие функции: Буферизацию (при асинхронном режиме обмена данными); преобразование формата данных; сопряжение микроЭВМ с внешними устройствами в режиме прерывания.
Режимы работы ППИ задаются при начальной установке. 4 подадресных регистра схемы включают в себя 3 регистра каналов вв/выв данных A, B, C и регистр управления (управляющего слова).
Регистр канала C м/б подразделен на 2 4-х разрядных регистра вв/выв. данных доступ к которым осуществляется как к отдельным независимым регистрам.
Имеется возможность подразделения 3-х каналов на 2 группы. В этих группах каналы А и В используются для обмена данными с микроЭВМ, а отдельная шина канала С для записи управляющего сигнала.
Существует 3 режима работы схемы:
1. Режим «0» - простой вв/выв. данных по 3-м 8-и разрядным каналам (С может быть разделен на 2 4-х разрядных). Каждый из каналов может быть отдельно использован для ввода вывода информации. При работе схемы в таком режиме никаких дополнительных сигналов управления не требуется.
2. Режим «1» позволяет осуществлять обмен данными по каналам А и В с помощью сигналов управления, подаваемых по каналу С. Для каналов А и В существует 4 комбинации взаимных направлений передачи данных:
- каналы А и В работают в режиме вв данных;
- каналы А и В в режиме выв. данных;
- канал А – в режиме вв, В в режиме вывыода.
- и наоборот.
Незадействованная для передачи управляющих сигналов с шины канала С может быть использованы для вв/выв. информации.
Направление передачи по этим шинам определяется управляющим словом записанным в регистре управления.
Каналы А и В работают в режиме вв. данных.
Данные вводятся из внешнего устройства в МП.
Схема передачи управляющих сигналов.
Временная диаграмма работы каналов А и В в режиме ввода данных
![]()
![]()
![]()
1. В канал поступили новые данные
2. Данные записаны во входной буфер данных
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.