Также в графе Next Block мы
зададим следующий блок калькуляции CA_01, в котором производим пересчет в инженерные единицы по
формуле [4].
Рис. 3.
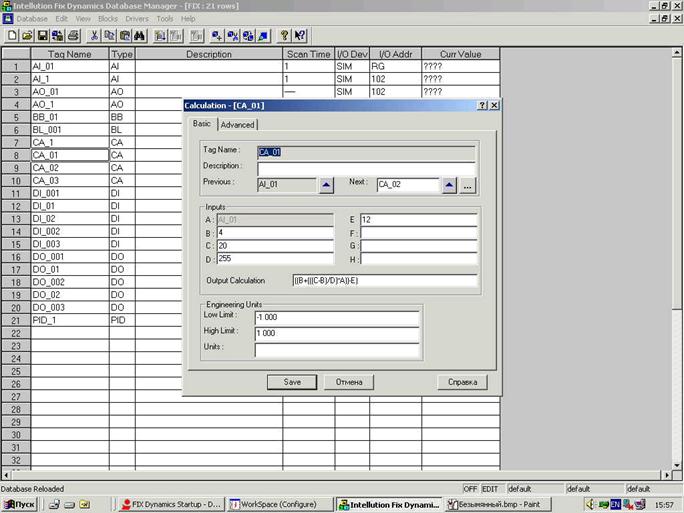
Блок СА (Calculation) является вторичным блоком. Это блок вычисления. Для вторичного блока задается формула, которая позволяет реализовать выражение.
![]()
В графе Output Calculation вводим арифметическое выражение с использованием стандартных знаков арифметических операций, а операнды задаем буквами латинского алфавита от A до H. Значение константы или идентификатор переменной, соответствующий каждой букве в выражении задается в таблице, расположенной выше графы Output Calculation.
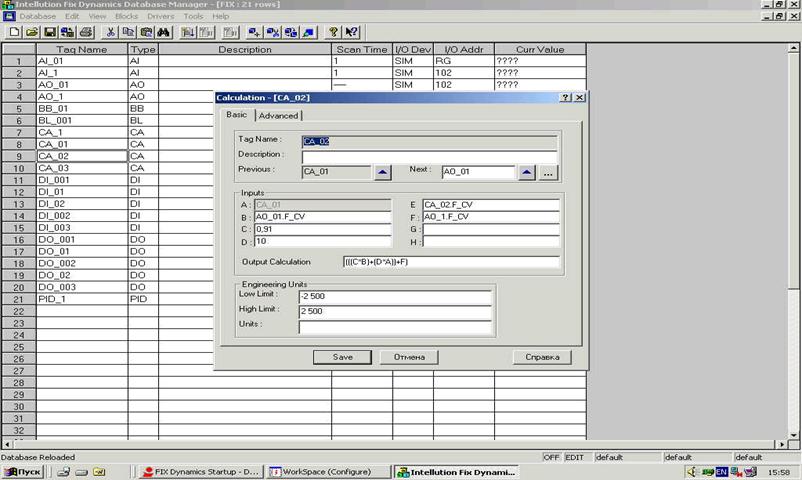
Рис. 4
Следующий блок CA_02, в котором выполняется выражение [3]. В блоке СА_02, также как и в блоке СА_01, записывается выражение в Output Calculation с помощью букв (A¸H). Сами значения (константы или имена полей тэгов), входящие в выражение, помещаются под именем букв от А до Н. В Next Block записывается следующий блок – блок аналогового вывода (Analog Output Block).
На рисунке 5 представлен блок аналогового вывода.
Блок АО является вторичным блоком, также может быть уединенным блоком. Его задача – выдать аналоговое значение на определенном аналоговом выходе.
Первый раз, когда FIX стартует или база перезагружается в блоке АО_01 задается начальное значение Initial Value равное 0. Потом АО будет выдавать значения, вычисляемые по цепочке. Сканирование АО происходит с периодичностью Scan Time, заданной в блоке AI.

Применяем принципы управления выходом объекта с помощью регулятора в обратной связи цепи управления.
Требуется стабилизировать выход объекта управления, который был смоделирован выше с помощью драйвера симуляции SIM FIX.
Если управляем реальным объектом, то приведенная в разделе 1, модель не нужна, т. к. для блоков AI и АО мы бы указывали номер адреса входов/выходов по протоколу ModBus в плате ввода/вывода контроллера, подключенного к объекту.
При управлении моделью объекта, выполненной с помощью драйвера SIM, воспользуемся общими ячейками памяти драйвера SIM для связи входов-выходов модели и цепочки регулирования.
Создадим обратную связь при помощи цепочки с блоком PID. Для этого создадим параллельную цепочку описанной ранее цепочке. Вторая цепочка будет состоять из следующих блоков:
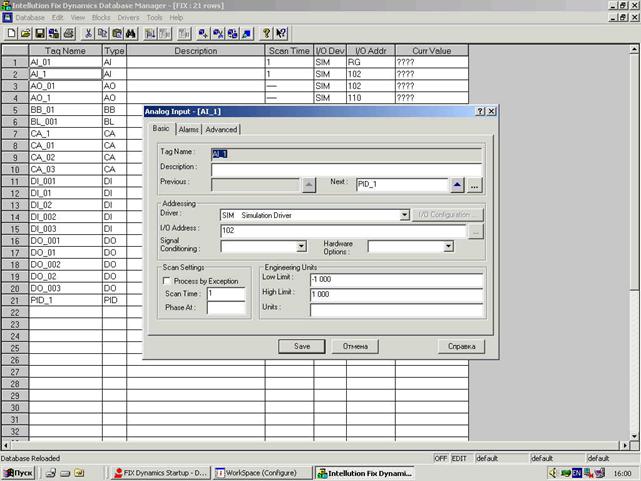 |
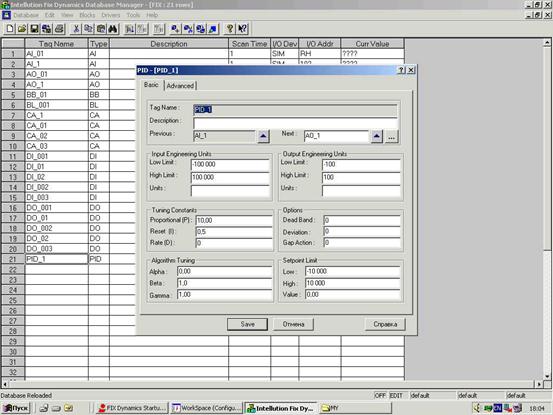
Рис. 6.
PID блок поддерживает баланс в замкнутом контуре, изменяет регулирующую переменную (аналоговый выход) в соответствие с отклонениями заданной точки некоторого текущего значения (аналоговый вход).
Вышестоящий блок AI и нижестоящий блок АО должны иметь те же инженерные единицы, что и PID блок.
 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.