







 Параметры цифровых схем
определяются по их статическим характеристикам. Основной статической
характеристикой является передаточная характеристика Vвых = f(Vвх.) –
зависимость потенциала на выходе от потенциала на одном из входов при
постоянных значениях потенциала на остальных входах. По типу передаточной
характеристики цифровые схемы делятся на инвертирующие, на выходе
которых образуется инверсия (И – НЕ, ИЛИ – НЕ, НЕ) и неинверитрующие ,
на выходе которых образуется неинверсный логический сигнал.
Параметры цифровых схем
определяются по их статическим характеристикам. Основной статической
характеристикой является передаточная характеристика Vвых = f(Vвх.) –
зависимость потенциала на выходе от потенциала на одном из входов при
постоянных значениях потенциала на остальных входах. По типу передаточной
характеристики цифровые схемы делятся на инвертирующие, на выходе
которых образуется инверсия (И – НЕ, ИЛИ – НЕ, НЕ) и неинверитрующие ,
на выходе которых образуется неинверсный логический сигнал.
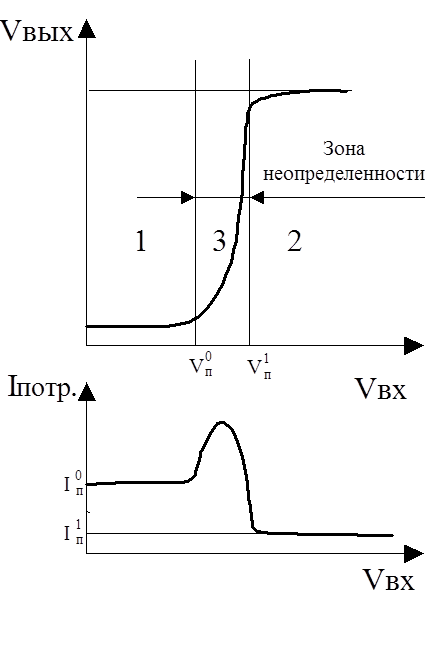
Цифровая схема должна обеспечить четкое разделение уровней лог.1, лог. 0, поэтому передаточная характеристика имеет 3 явно выраженных участка. Участок 1 соответствует Vвых. = V0, участок 2 соответствует Vвых. = V1, участок 3 – промежуточное состояние. Значения потенциалов, соответствующие границам участка 3 называются порогами переключения, а сам этот участок – зоной неопределенности. При последовательном включении нескольких элементов их общая передаточная характеристика изменяется так, что зона неопределенности уменьшается.
Максимально – допустимая величина потенциальной помехи, не вызывающая сбоя в цифровой схеме называется помехоустойчивостью и определяется выражением:
В цифровых схемах обычно ![]()
Vлог. –
логический перепад (V1 – V0)
, поэтому можно считать, что ![]() -
средний порог переключения. Для того, чтобы получать достаточно большие
значения допустимой помехи
-
средний порог переключения. Для того, чтобы получать достаточно большие
значения допустимой помехи ![]() ,
, ![]() , нужно, чтобы средний порог
переключения был посредине между V0 и V1.
, нужно, чтобы средний порог
переключения был посредине между V0 и V1.
Помехи можно разделить на статические и динамические. Статические помехи возникают, если:
1. корпуса электрически связанных между собой микросхем работают в разных температурных режимах (есть зависимость порога переключения от температуры).
2. Существуют падения напряжения на шинах по цепям питания (общая шина и шина от источника питания.
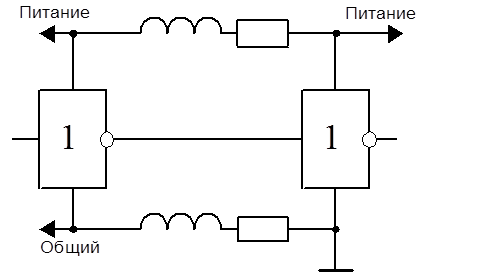
Динамические помехи связаны
1. С
наличием паразитной емкостной и индуктивной связи между проводниками,
соединяющими микросхемы. При изменении напряжения V
на одном из проводников из-за емкостной связи на соседний проводник наводится
ток I =  .
При этом возникает напряжение помехи, которое может вызвать ложное срабатывание
логического элемента. Резкий перепад тока I в
одном проводнике благодаря индуктивной связи Мсв с соседним проводником
наводит в нем ЭДС Е =
.
При этом возникает напряжение помехи, которое может вызвать ложное срабатывание
логического элемента. Резкий перепад тока I в
одном проводнике благодаря индуктивной связи Мсв с соседним проводником
наводит в нем ЭДС Е =  , что может
привести к тому же результату.
, что может
привести к тому же результату.
2. Динамические помехи также возникают из-за пульсаций напряжения питания , возникающих при переключении микросхемы из одного состояния в другое (динамическое увеличение потребляемого тока). Пульсации питания могут изменять порог переключения микросхемы, что уменьшает помехозащищенность, а также приводит к модуляции задержки микросхемы.
Разные типы микросхем могут выдерживать разные уровни помех без переключения их состояния. С повышением быстродействия микросхем их чувствительность к помехам возрастает. Причины: увеличение крутизны фронтов переключения (dV/dt, dI/dt), что приводит к увеличению амплитуды помехи. Для уменьшения возможностей возникновения помехи применяют специальные конструктивные меры.
К статическим параметрам относятся также входное и выходное сопротивления логического элемента. Так как эти сопротивления обычно нелинейные и их величина зависит от логического состояния на входе или выходе, то пользуются эквивалентными схемами для обеих логических состояний или внешними характеристиками по входу и выходу.
Мощность Р и ток Iпотр., потребляемый схемой, могут зависеть от ее логического состояния. Средняя потребляемая мощность в статическом режиме:
![]()
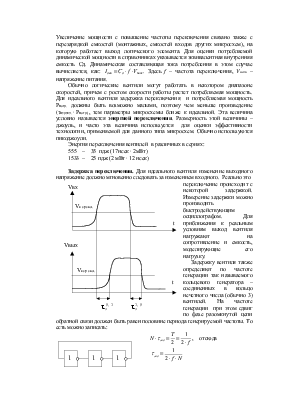
В процессе переключения
потребляемый ток у некоторых типов микросхем увеличивается, поэтому такие схемы
потребляют дополнительно динамическую мощность, величина которой
пропорциональна частоте переключения. Увеличение мощности с повышение частоты
переключения связано также с перезарядкой емкостей (монтажных, емкостей входов
других микросхем), на которую работает выход логического элемента. Для оценки
потребляемой динамической мощности в справочниках указывается эквивалентная
внутренняя емкость Сд. Динамическая составляющая тока потребления в этом случае
вычисляется, как: ![]() . Здесь f – частота переключения, Vпит
– напряжение питания.
. Здесь f – частота переключения, Vпит
– напряжение питания.
Обычно логические вентили могут работать в некотором диапазоне скоростей, причем с ростом скорости работы растет потребляемая мощность. Для идеального вентиля задержка переключения. и потребляемая мощность Рпотр. должны быть возможно малыми, поэтому чем меньше произведение (tперекл. ∙ Рпотр.), тем параметры микросхемы ближе к идеальной. Эта величина условно называется энергией переключения. Размерность этой величины – джоуль, и часто эта величина используется для оценки эффективности технологии, применяемой для данного типа микросхем. Обычно используются пикоджоули.
Энергия переключения вентилей в различных в сериях:
555 – 35 пдж (17нсек ∙ 2мВт)
1533 – 25 пдж (2 мВт ∙ 12 нсек)
Задержка переключения. Для идеального вентиля изменение выходного напряжение должно мгновенно следовать за изменением входного. Реально это
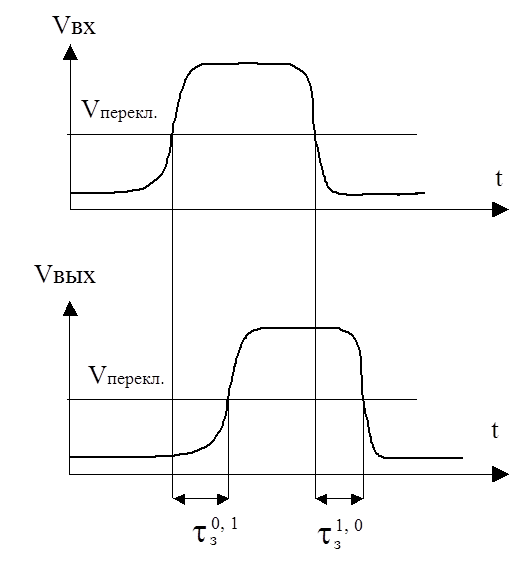 переключение
происходит с некоторой задержкой. Измерение задержки можно производить быстродействующим
осциллографом. Для приближения к реальным условиям выход вентиля нагружают на
сопротивление и емкость, моделирующие его нагрузку.
переключение
происходит с некоторой задержкой. Измерение задержки можно производить быстродействующим
осциллографом. Для приближения к реальным условиям выход вентиля нагружают на
сопротивление и емкость, моделирующие его нагрузку.
Задержку вентиля также определяют по частоте генерации так называемого кольцевого генератора – соединенных в кольцо нечетного числа (обычно 3) вентилей. На частоте генерации при этом сдвиг по фазе разомкнутой цепи обратной связи должен быть равен половине периода генерируемой частоты. То есть можно записать:
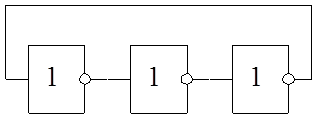
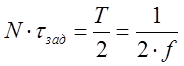 ,
отсюда
,
отсюда
Этот метод при использовании электронно-счетного частотометра позволяет получить высокое разрешение, что необходимо при измерении зависимости задержки от температуры, питающего напряжения.
Коэффициент разветвления – максимальное число входов логических схем, на которое может работать один выход лог. схемы, при этом сохраняется гарантированные задержка и логические уровни. Обычно коэффициент разветвления цифровых микросхем больше 10.
1. Схема «НЕ» (отрицание).
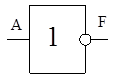
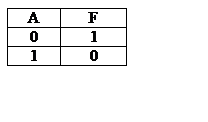
![]()
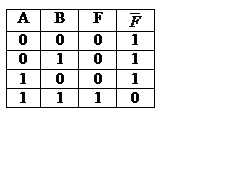
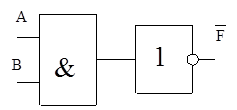
2. Схема «И» (логическое умножение)
Для примера ниже даны условное графическое обозначение, математическая запись функции и таблица состояния схемы «2И»:
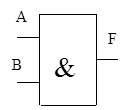
![]()
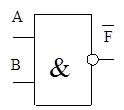
Часто схемы «И» используются с инверсией на выходе, в этом случае они называются «И-НЕ».
|
![]()
Промышленность выпускает микросхемы 2И, 3И, 4И, а также с инверсией на выходе: 2И-НЕ, 3И-НЕ, 4И-НЕ, 8И-НЕ.
3. Схема «ИЛИ» (логическое сложение).
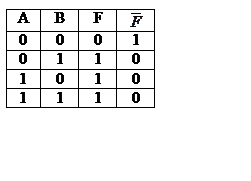
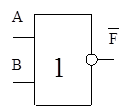 Схема
2ИЛИ-НЕ:
Схема
2ИЛИ-НЕ:
![]()
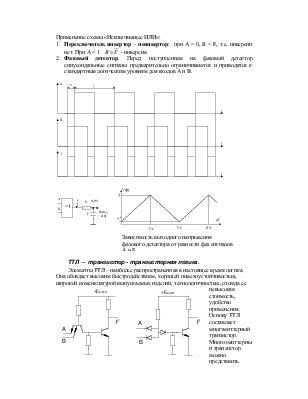
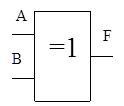
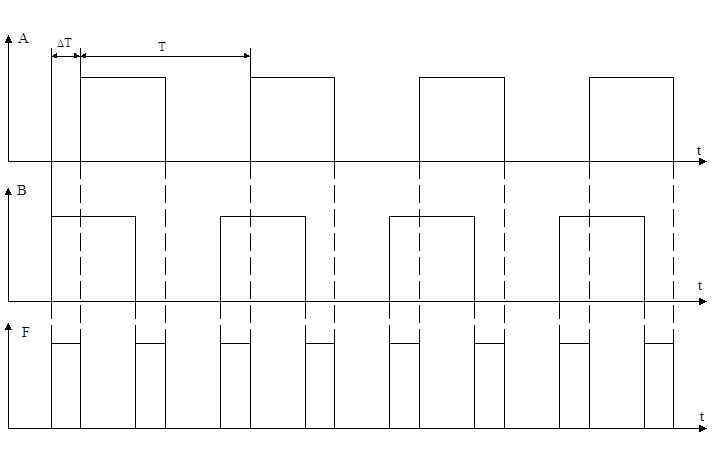
4. Схема «Исключающее ИЛИ» (Сложение по модулю 2).
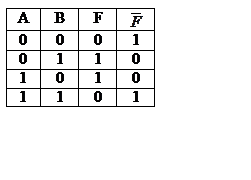
![]()
![]()
Применение схемы «Исключающее ИЛИ»:
1.
Переключатель инвертор – неинвертор: при А = 0, B = F, т.е. инверсии нет. При А = 1![]()
![]() -
инверсия.
-
инверсия.
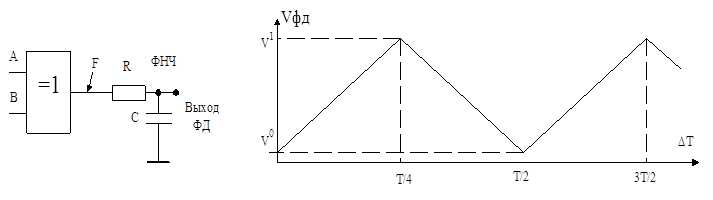
2. Фазовый детектор. Перед поступлением на фазовый детектор синусоидальные сигналы предварительно ограничиваются и приводятся к стандартным логическим уровням для входов А и В.
|
 Элементы ТТЛ
– наиболее распространенная в настоящее время логика. Она обладает высоким
быстродействием, хорошей помехоустойчивостью, широкой номенклатурой выпускаемых
изделий, технологичностью, отсюда ее невысокая стоимость, удобство применения.
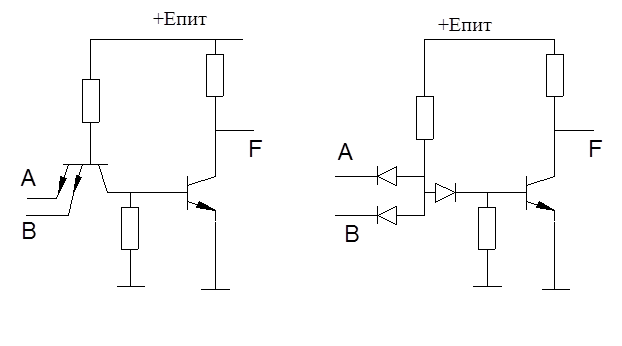
Основу ТТЛ составляет многэмиттерный транзистор. Многоэмиттерный транзистор можно
представить диодной сборкой. Транзистор в данной схеме отпирается только тогда,
когда напряжения на обеих входах А, В больше , чем 0.7В. Если же хотя бы на
одном из входов А или В напряжение равно нулю, то транзистор Т1 закрыт.
Преимущества многоэмиттерного транзистора перед диодной сборкой.
Элементы ТТЛ
– наиболее распространенная в настоящее время логика. Она обладает высоким
быстродействием, хорошей помехоустойчивостью, широкой номенклатурой выпускаемых
изделий, технологичностью, отсюда ее невысокая стоимость, удобство применения.
Основу ТТЛ составляет многэмиттерный транзистор. Многоэмиттерный транзистор можно
представить диодной сборкой. Транзистор в данной схеме отпирается только тогда,
когда напряжения на обеих входах А, В больше , чем 0.7В. Если же хотя бы на
одном из входов А или В напряжение равно нулю, то транзистор Т1 закрыт.
Преимущества многоэмиттерного транзистора перед диодной сборкой.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.