Кафедра «Промышленные космические системы»
Курсовая работа
«Моделирование интерфейсного модуля полезной нагрузки»
ВЫПОЛНИЛ:
Студент гр.10510
РУКОВОДИТЕЛЬ:
Главный специалист отдела 12/612
Цель работы
-
Разработка и создание математической модели интерфейсного модуля полезной нагрузки спутников связи на примере КА “Ямал-601”.
-
В рамках работы должны быть решены следующие основные задачи:
-
Изучение полезной нагрузки и выбор модели полезной нагрузки.
-
Разработка физической модели интерфейсного модуля полезной нагрузки.
-
Создание математической модели работы интерфейсного модуля полезной нагрузки.
Изучение реализаций интерфейсного модуля полезной нагрузки
Реализация PLDIU1553 YAMAL601
-
Интерфейсный модуль PLDIU1553 YAMAL601 отвечает за:
-
Распространение и сбор данных оборудования полезной нагрузки, всех команд и данных мониторинга.
-
Сбор температур полезной нагрузки
-
Распределение основной мощности к ретранслятору высокой мощности
-
Распределение основной мощности на блоки питания
-
Распределение мощности в линию нагревателей космического аппарата
-
Срабатывание пироболтов платформы антенны
-
Телеметрию, двигательные команды, связанные с положением антенны
-
Подключение автономных подогревателей антенны к распределительной плате основной мощности
Анализ полезной нагрузки Ка диапазона КА «Ямал 601»
Блоки полезной нагрузки
-
Блок полезной нагрузки реализованный через команды и телеметрические матрицы
-
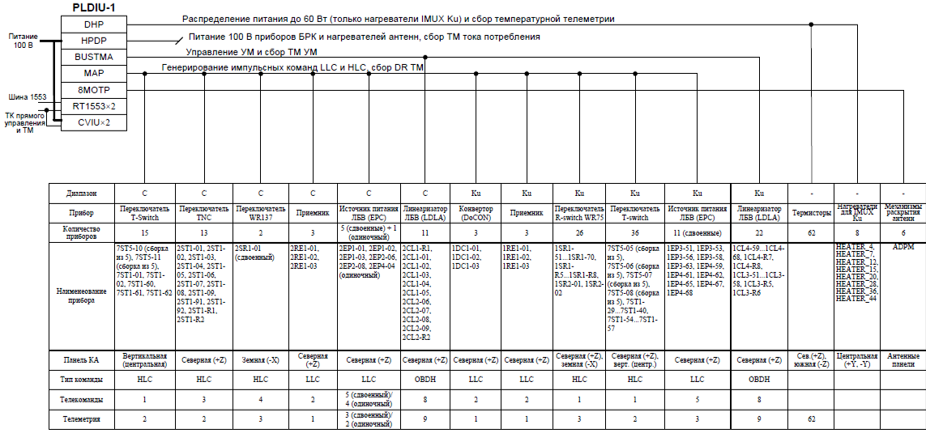
PLDIU1553 должен быть в состоянии генерировать команды низкого или высокого уровня (до 383 матриц команд) северной и южной PLDIU.
-
Каждый PLDIU1553 должен быть в состоянии получить до 640 цифровых сигналов телеметрии.
-
Блок полезной нагрузки реализованный через нематричную телеметрию
-
Каждый PLDIU1553 должен быть в состоянии получить:
-
до 32 аналоговых сигналов телеметрии;
-
до 64 цифровых сигналов телеметрии.
-
Блок полезной нагрузки реализованный через OBDH шину данных
-
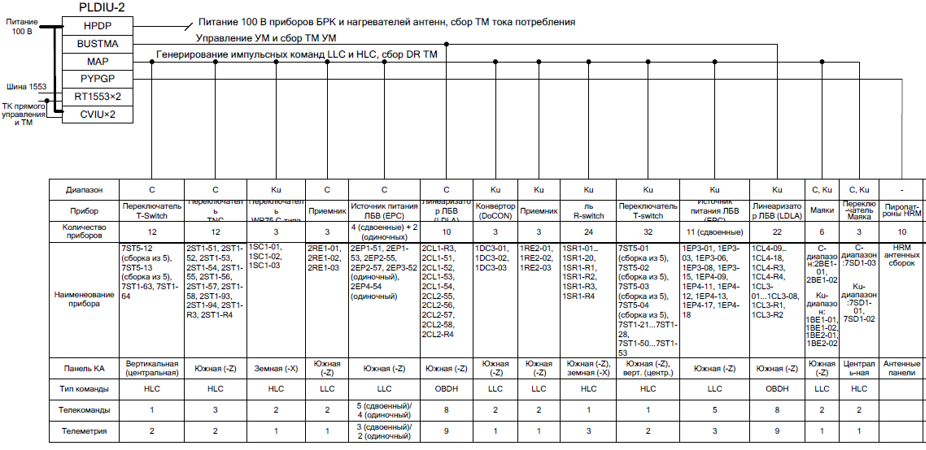
Каждый PLDIU1553 должен позволять взаимодействовать с 60 единицами специализированных полезных нагрузок (30 максимум на шине).
-
PLDIU1553 передает все полученные команды на шине 1553 к шине данных OBDH, без какой-либо проверки их содержания.
Определение функционалов контроллера шины и монитора шины, удаленных контроллеров
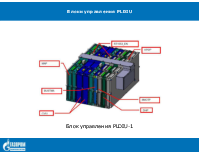
Блоки управления PLDIU
Блок управления PLDIU-1
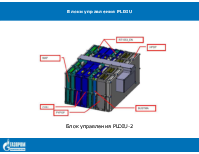
Блоки управления PLDIU
Блок управления PLDIU-2
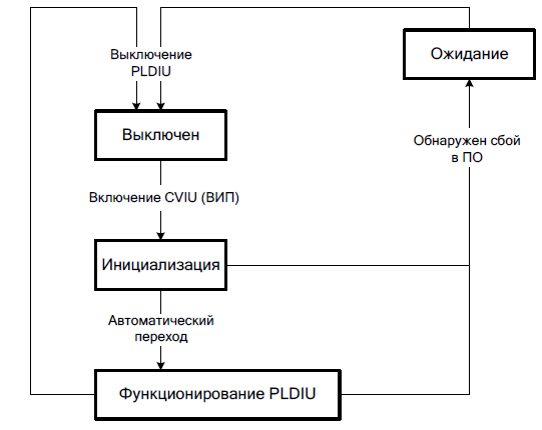
Режимы функционирования PLDIU
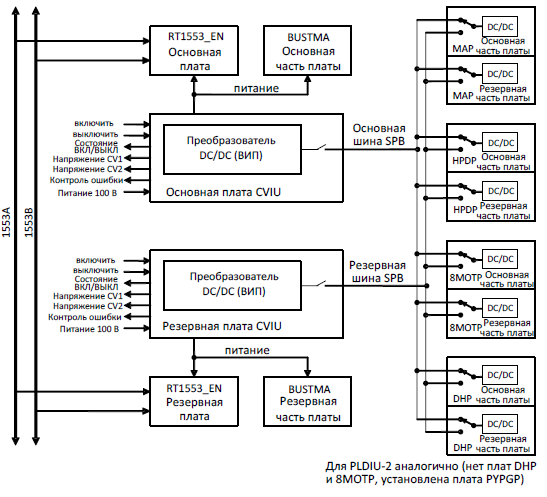
Описание взаимодействия контроллера шины и монитора шины, удаленных контроллеров
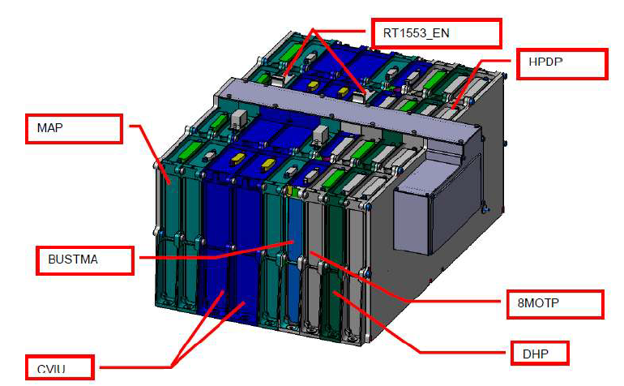
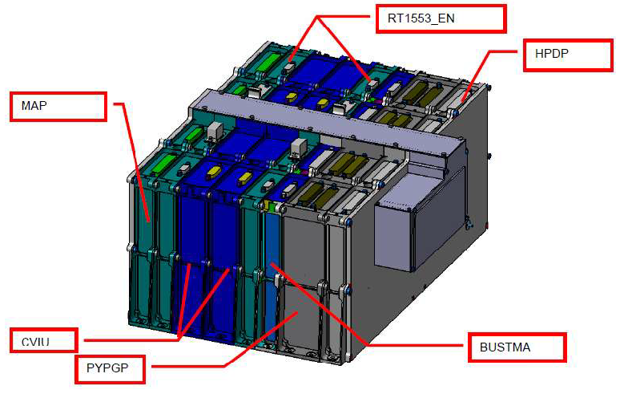
Логика подключения плат PLDIU
Блок диаграмма управления PLDIU-1 приборами БРК
Блок диаграмма управления PLDIU-2 приборами БРК
Разработка исходных данных состояния удаленных контроллеров
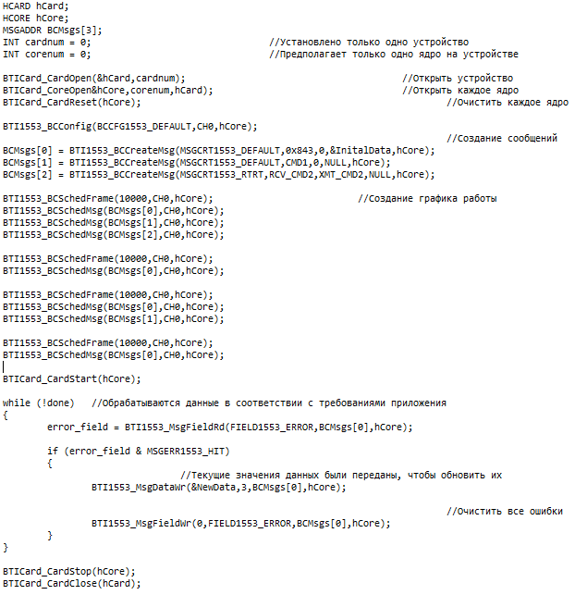
Базовый каркас приложения
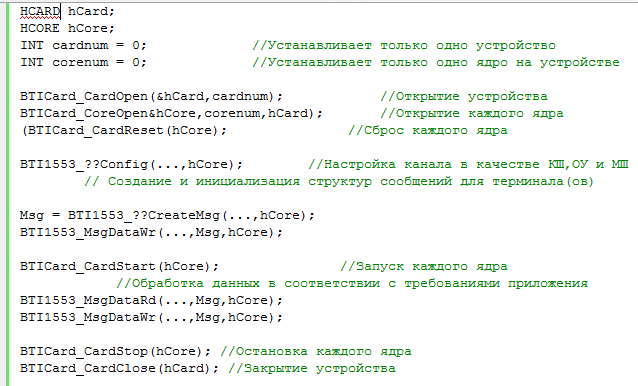
Настройка контроллера шины (КШ)
-
Конфигурация терминала BC состоит из двух основных компонентов: набора структур сообщений и графика работы
-
Структуры сообщений для настройки КШ создаются с помощью команды BTI-1553_BCCreateMsg. Эти структуры сообщений содержат командные слова, слова состояния и данных, а также временные метки и другую информацию.
-
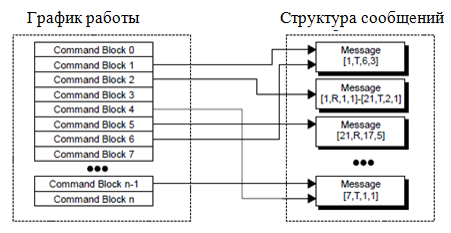
График работы состоит из массива блоков команд, исполняемых процессором на устройстве. Каждый блок команд содержит код операции. Код операции контролирует время управления и передачу сообщений.
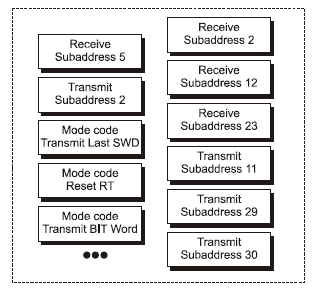
Настройка оконечных устройств (ОУ)
-
Конфигурация удаленного терминала состоит из набора структур сообщений. Каждая структура сообщения в ОУ связана с конкретным комбинацией бит T/R (передача/прием) и Subaddress/mode-code (Субадрес/режим кода). Команда BTI1553_RTConfig может автоматически создавать структуры сообщений для каждой комбинации T/R бит и Субадрес/режим кода.
-
Также, структура сообщений ОУ может быть создана с помощью команды BTI-1553_RTCreateMsg.
-
Командные слова, для которых не были созданы структуры сообщений считаются недостоверными.
Настройка монитора шины (МШ)
-
МШ представляет собой терминал, который слушает, фильтрует, и сохраняет сообщения 1553 наряду с другой полезной информацией (например, по временными-флагами). Команда BTI1553_MonConfig создает терминал МШ и команда BTICard_SeqConfig настраивает монитор и выделяет память для загрузки данных устройства.
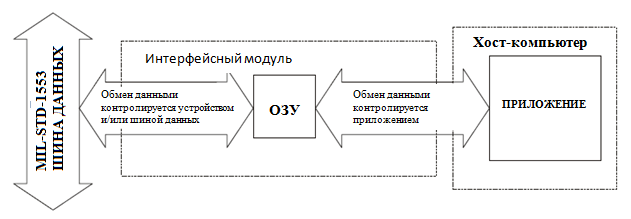
Передача данных
-
Устройство не взаимодействует с MIL-STD-1553 до тех пор пока команда BTICard_CardStart не связывается шиной данных. В это время все терминальные конфигурации становятся активными и устройство отвечает на шину данных независимо от главного компьютера до тех пор пока команда BTICard_CardStop не останавливает их. Модель КШ обрабатывает свой график (если он присутствует); смоделированные ОУ автоматически отвечают на команды с КШ.
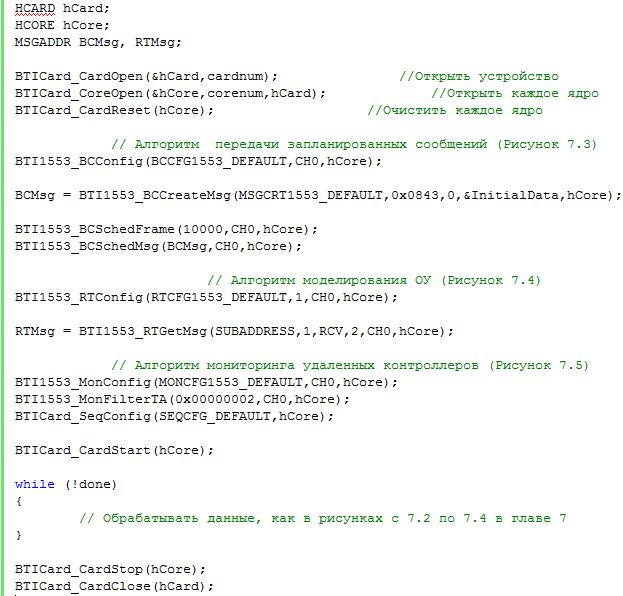
Разработка алгоритмов мониторинга и управления удаленными контроллерами
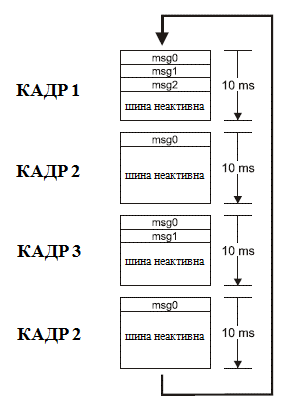
Моделирование КШ: запланированные сообщения
-
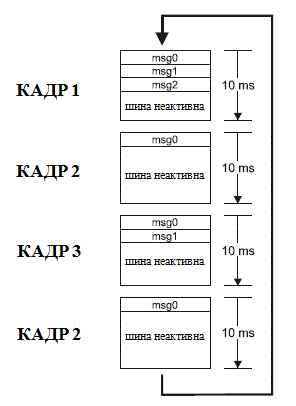
Сообщения на MIL-STD-1553 шине данных, как правило, передаются в соответствии с периодическими графиками работы. Эти графики, как правило, состоят из синхронизированных групп сообщений, называемых кадрами.
-
Предположим, например, что мы хотели бы передать три сообщения по следующим правилам:
-
• msg0каждые 10 миллисекунд
-
• msg1 каждые 20 миллисекунд
-
• msg2 каждые 40 миллисекунд
-
Видны повторы сообщений в разных кадрах и возможны повторения кадров в цикле
Моделирование КШ: запланированные сообщения
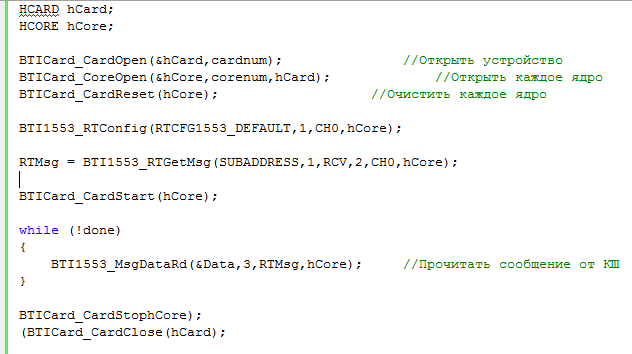
Моделирование ОУ
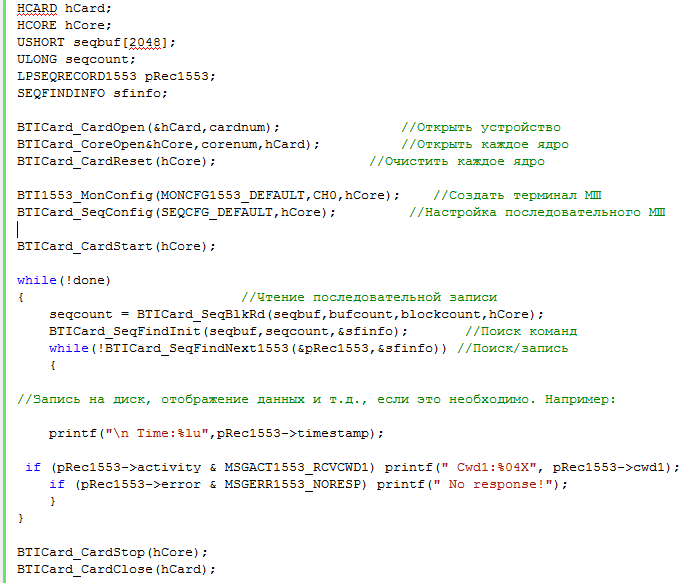
Последовательный монитор шины (МШ)
Создание математической модели интерфейсного модуля полезной нагрузки
Создание математической модели интерфейсного модуля полезной нагрузки
СПАСИБО ЗА ВНИМАНИЕ