Зміна задаючої
величини ![]() в
перший момент часу приводить до відповідного зростання відхилення, оскільки
ланки перед об'єктом і сам об'єкт володіють інерційністю і тому частота
обертання валу не може змінитися миттєво. Зміна відхилення, будучи посилена
підсилювачем, перетворювачем тиристора і генератором, з врахуванням їх
інерційності приводить до поступової зміни керуючої величини – напруги на
якорі, яка плавно змінює частоту обертання валу так, що помилка стеження, тобто
відхилення, спрямовується до нуля. Зворотний зв'язок по напрузі стабілізує САК
і підвищує її швидкодію. Таким чином здійснюється стеження.
в
перший момент часу приводить до відповідного зростання відхилення, оскільки
ланки перед об'єктом і сам об'єкт володіють інерційністю і тому частота
обертання валу не може змінитися миттєво. Зміна відхилення, будучи посилена
підсилювачем, перетворювачем тиристора і генератором, з врахуванням їх
інерційності приводить до поступової зміни керуючої величини – напруги на
якорі, яка плавно змінює частоту обертання валу так, що помилка стеження, тобто
відхилення, спрямовується до нуля. Зворотний зв'язок по напрузі стабілізує САК
і підвищує її швидкодію. Таким чином здійснюється стеження.
Зміна збурення, моменту на валу двигуна, приводить до зміни частоти обертання, яке, внаслідок наявності головного зворотного зв'язку приводить до відповідної зміни відхилення. Ця зміна відхилення посилюється і тим самим змінює величину напруги на якорі так, що відхилення частоти, викликане зміною збурення, компенсується. Таким чином здійснюється стабілізація частоти обертання валу двигуна.
Отже, САК ЧОВ ДПС забезпечує як стабілізацію, так і стеження.
2.4. Параметри і передавальні функції елементів САК ЧОВ ДПС
П - підсилювач моделюється аперіодичною ланкою з передавальною функцією:
з параметрами: ![]() ,
,
![]() с.
с.
ТП - теристорний перетворювач моделюється аперіодичною ланкою з передавальною функцією:
![]()
з параметрами: ![]()
![]() с
с
Г - генератор, аперіодична ланка:
![]()
з параметрами: ![]()
![]()
ЗЗН - гнучкий зворотний зв'язок по напрузі інерційно-диференціююча ланка з параметрами:
![]()
з параметрами: ![]()
![]()
ТГ - тахогенератор, підсилювальна (пропорційна) ланка:
![]()
з параметрами: ![]()
ДПС – двигун постійного струму, коливальна ланка.
параметри: ![]()
![]()
![]() с.
с.
![]() с.
с.
Передавальна функція двигуна постійного струму по каналу управління, що визначає вплив напруги на якорі двигуна на частоту обертання його валу
![]() а
за каналом збурення:
а
за каналом збурення:
![]()
Сукупність передавальних функцій елементів САК і функціональної схеми дозволяє побудувати її структурно-алгоритмічну модель, а також аналітичну модель, що є передавальною функцією всієї САК.
РОЗДІЛ 3
ПОБУДОВА ТА АНАЛІЗ МОДЕЛІ САК
3.1. Побудова та перевірка стійкості САК
Побудуєм розімкнений контур САК. На вхід подамо східчасту напругу. Вихід підсилювача зворотного зв'язку підключимо до осцилографа і запустимо моделювання.
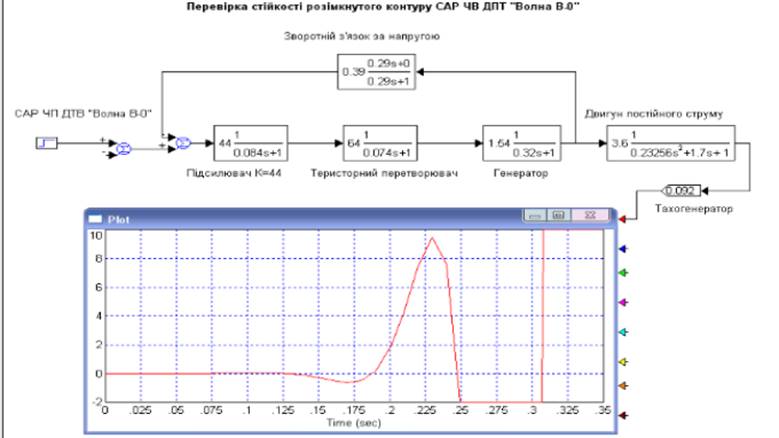
Рисунок показує, що розімкнена САК нестійка, оскільки його вихідний сигнал представляє собою коливання з амплітудою, що швидко збільшується. Для забезпечення виконання необхідної умови практичного застосування критерію Найквіста, розімкнену САК потрібно стабілізувати.
Неважко побачити, що втрата стійкості розімкненої САК виникає через наявність місцевого зворотного зв'язку (системи, складені із стійких ланок і зворотні зв'язки, можуть втрачати стійкість). Цікаво відмітити, що цей зв'язок був введений для того, щоб забезпечити достатню стійкість і якість результуючої САК. Це вказує на те, що параметри ланки зворотного зв'язку по напрузі задані невдало і потребують корекції.
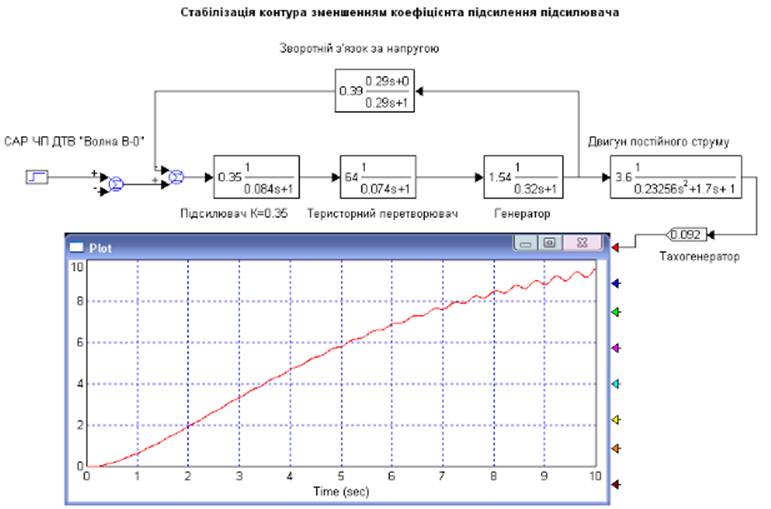
3.2. Стабілізація контуру зменшенням коефіцієнта посилення підсилювача
Стабілізація розімкненої САК здійснюється з метою забезпечення виконання необхідної умови практичного вживання критерію Найквіста: розімкнений контур повинен бути стійким із запасом по амплітуді в діапазоні 6 - 20 дБ (в 2 - 10 разів).
Здійснити стабілізацію розімкненого контуру в даному випадку можна, змінюючи параметри двох елементів: підсилювача і ланки зворотного зв'язку по напрузі (ЗЗН). Спершу спробуємо просто зменшувати коефіцієнт посилення підсилювача до тих пір, поки розімкнений контур не буде переведений в стан, близький до граничного між стійким і нестійким режимами.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.