1.4. Визначення області стійкості САК
Знання діапазону зміни деякого параметра системи управління, в якому система зберігає стійкість, дозволяє оцінити сприйнятливість системи до збурень, що приводять до відхилення досліджуваного параметра від його оптимального значення. На практиці тут потрібно буде оцінити і вплив збурюючих чинників на вибраний, названий вище параметр.
Визначення області стійкості САК може бути здійснене методом D-розбиття по коефіцієнту посилення контура. Для цього може бути застосований будівник годографа Найквіста в VisSim. Слід тільки виразити з характеристичного рівняння замкнутої САК коефіцієнт посилення у вигляді раціональної для дробу функції. У VisSim ступінь чисельника лінійної ланки не повинен перевищувати ступінь знаменника. Якщо отримана раціональна для дробу функція матиме ступінь чисельника вище за ступінь знаменника, то для такого випадку може бути побудована область стійкості для інверсного значення 1/k.
РОЗДІЛ 2
БУДОВА ТА ПРИНЦИП ДІЇ САК
2.1. Функціональна схема і принцип дії САК
САК ЧОВ ДПС – система автоматичного керування частоти обертання валу двигуна постійного струму незалежного збудження. На рисунку зображена функціональна схема САК (рис.1).
САК є замкнутим контуром головного зворотного зв'язку, який здійснює управління по відхиленню. В контурі є і гнучкий місцевій зворотній зв'язок, який призначеній для стабілізації САК. Наявність зворотних зв'язків в САК свідчить про те, що система може бути і нестійкою, тому аналіз повинний включати оцінку її стійкості і, при необхідності, вибір заходів і засобів по її стабілізації.
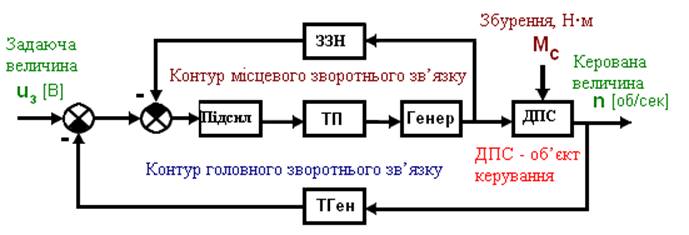
Рис.1. Вихідна функціональна схема САК ЧОВ ДПТ. П - підсилювач; ТП - тиристорний перетворювач;
Г
- генератор; ТГ - тахогенератор; ЗЗН - гнучкий зворотний зв'язок по напрузі ДПС
- об'єкт управління ( двигун постійного струму ), його вихідна величина,
частота обертання валу ![]() ,
,
![]() -
задаюча напруга,
-
задаюча напруга,
![]() -збурюючий
момент сили, прикладений до валу ДПС від тієї машини, яку він приводить в дію.
-збурюючий
момент сили, прикладений до валу ДПС від тієї машини, яку він приводить в дію.
Слід зазначити, що в даній схемі змінювати можна лише параметри підсилювача і ланки місцевого зворотного зв'язку. Ці елементи введені в схему якраз для того, щоб забезпечити можливість її корекції. Не виключено, що параметри ланки зворотного зв'язку по напрузі (ЗЗН) задані невдало і потребують істотної корекції.
2.2. Принцип роботи САК ЧОВ ДПС в статиці
У статиці вхідні,
а, отже, і вихідні, сигнали САК постійні. На перший, лівий суматор контуру
головного зворотного зв'язку, його порівнюючий пристрій, подається задаюча
величина і величина з виходу тахогенератора, пропорційна частоті обертання
валу. Різницевий сигнал ![]() , що
має малу величину, посилюється підсилювачем, перетворювачем тиристора і
генератором, внаслідок чого виходить вхідний керуючий сигнал ДПС (двигуна
постійного струму, об'єкту керування), тобто напруга на якорі. Внаслідок
наявності цієї напруги вал двигуна обертається. Оскільки добуток коефіцієнтів
підсилення підсилювача, перетворювача тиристора і генератора велике, то
отримати деяку конкретну керуючу напругу на якорі двигуна можна лише в тому
випадку, якщо різницевий сигнал
, що
має малу величину, посилюється підсилювачем, перетворювачем тиристора і
генератором, внаслідок чого виходить вхідний керуючий сигнал ДПС (двигуна
постійного струму, об'єкту керування), тобто напруга на якорі. Внаслідок
наявності цієї напруги вал двигуна обертається. Оскільки добуток коефіцієнтів
підсилення підсилювача, перетворювача тиристора і генератора велике, то
отримати деяку конкретну керуючу напругу на якорі двигуна можна лише в тому
випадку, якщо різницевий сигнал ![]() –
малий. Це означає, що частота
–
малий. Це означає, що частота ![]() обертання
валу з деякою точністю пропорційна завданню
обертання
валу з деякою точністю пропорційна завданню ![]() .
Ланка зворотного зв’язку інерційно-диференціююча, оскільки зворотній зв’язок за
напругою гнучкий, і тому він не впливає на роботу САК в статиці.
.
Ланка зворотного зв’язку інерційно-диференціююча, оскільки зворотній зв’язок за
напругою гнучкий, і тому він не впливає на роботу САК в статиці.
2.3. Принцип роботи САР ЧОВ ДПС у динаміці
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.