При воздействии на колесо продольной тяговой силы FD или тормозной силы FВ коэффициент сопротивления уводу (Ку) снижается. Если колесо наклоняется по вертикали, в сторону действия боковой силы, то угол увода колеса увеличивается, при обратном направлении силы FS угол α уменьшается.
Если при повороте передние колеса вращаются свободно (без бокового юза и без торможения), то FВ = 0 и λ= 0, а результирующая сила FR = FS0.
Когда под передними колесами появляется юз, угол λ. определяющий направление скольжения, возрастает и, в зависимости от изменения коэффициента скольжения S в пределах 0 < S < 1, меняет свою величину от 0° до 90°. При этом за счет юза начинает увеличиваться сила Р„ торможения колеса (без срабатывания тормозной системы), а боковая сила FS в соответствии с векторной диаграммой (рис. 2, а) уменьшается.
Изменение направления скольжения (угол λ) при боковом юзе приводит к вращению результирующей силы FR вокруг вертикальной оси поворота колеса, что вызывает перераспределение сил FD, FR, FS и образование момента М вращения кузова автомобиля относительно центра масс под воздействием скольжения данного колеса. Ясно, что при боковом скольжении S, близком к единице (S ~ 1), боковой увод автомобиля превышает критическое значение и автомобиль становится неуправляемым.
Суммарный момент МЕ вращения кузова вокруг вертикальной оси равен сумме моментов от каждого колеса в отдельности: МЕ = М, + М2 + М3 + М4.
Управляя тяговыми силами FD ведущих колес (FD3 + FD4) и тормозными силами FВ всех четырех колес (FВ1, FВ2, FВ3, FВ4), возможно добиться такого состояния движения автомобиля на поворотах или на скользкой дороге, при котором МЕ << МК. Мк – критическое значение суммарного момента МЕ, при котором углы бокового увода центров переднего и заднего мостов появляются не под воздействием бокового юза, а в результате эластичного прогиба шин всех четырех колес. В таком случае колеса не срываются в юз и автомобиль остается управляемым. Функции автоматического управления подтормаживанием и тяговой силой колес при повороте автомобиля на большой скорости или при движении по скользкой дороге выполняет система управления курсовой устойчивостью (система VDC).
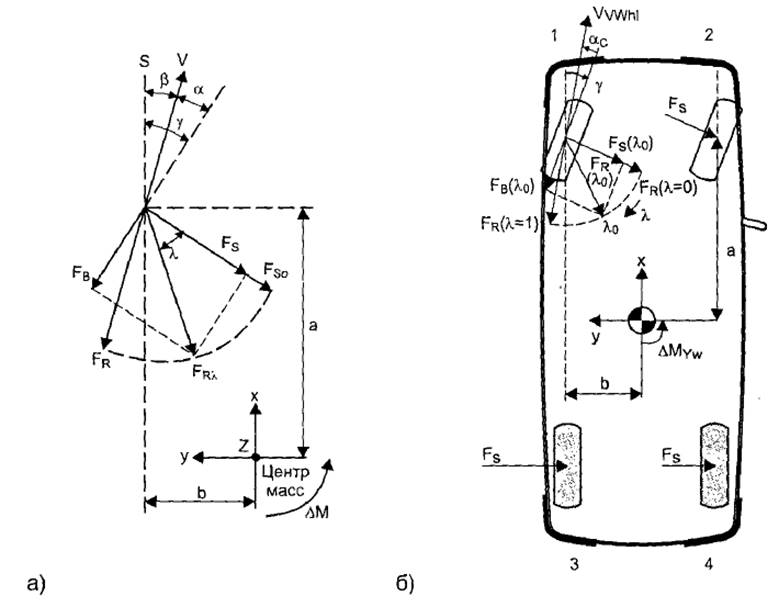
Рисунок 2 Силы, действующие на колеса автомобиля во время поворота
V – вектор скорости движения автомобиля; S – продольная ось автомобиля;
γ – угол поворота колеса относительно оси S; α – угол бокового увода колеса от фактического направления движения (от вектора V); β = (γ – α) – угол бокового увода автомобиля («угол рыскания»); FS – боковая сила действующая на ось колеса; Fв – тормозная сила колеса при его скольжении по дороге; FR – результирующая сила бокового увода колеса, равная векторной сумме тормозной (Fв) и боковой (FS) сил. (FR = FS +. Fв); λ – угол между осью колеса и направлением его скольжения
Функциональная блок-схема системы VDC
Функциональная блок-схема системы VDC, отвечающая решению фундаментальной задачи управления курсовой устойчивостью автомобиля, показана на рисунке 3. Такая схема описывает функциональную взаимосвязь параметров системы VDC и порядок их обработки.
Во-первых, по входным параметрам (воздействиям водителя на органы управления), которые с помощью датчика угла поворота рулевого колеса, датчика дроссельной заслонки и датчика давления в тормозной системе преобразуются в электрические сигналы, определяется номинальное (штатное) поведение автомобиля, описанное номинальными значениями регулируемых переменных. Это наиболее важная и наиболее сложная задача для контроллера системы VDC, так как поведение автомобиля зависит не только от воздействий водителя, но и от неизвестных воздействий окружающей среды, например, от трения между колесами и дорогой, от температуры воздуха и т. д. Кроме того, значения регулируемых переменных должны быть выбраны такими, чтобы поведение автомобиля в критических ситуациях было подобным движению в нормальных условиях.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.