1.1.1. Полное наименование системы и ее условное обозначение: Тяжёлый промышленный робот Аякс-450.
1.1.2. Плановые сроки начала и окончания работы по созданию системы: Начало работы 4.09.2014 г, окончание работы 25.12.2014 г.
1.1.3. Результат работ предъявить в виде курсового проекта по учебной дисциплине «конструирование роботов».
1.2.1. Назначение системы: Перемещение промышленных грузов массой до 450 кг на расстояния, не менее 2 м.
1.2.2. Цели создания системы: Импортозамещение, т.е. создать конкурентно способного отечественного робота в сфере подъёма полезных нагрузок для замещения зарубежных аналогов.
1.3.1. Провести информационный поиск
1.3.2. Задать кинематическую схему, исходя из анализа решаемых задач
1.3.3. Выбрать распределение приводов
1.3.4. Провести прочностной расчёт
1.3.5. Составить конструкторскую документацию на один из узлов сборки
Для выбора кинематической схемы, приводов, а так же редукторов проведём анализ существующих на рынке современных образцов манипуляторов той же массогабаритной категории.
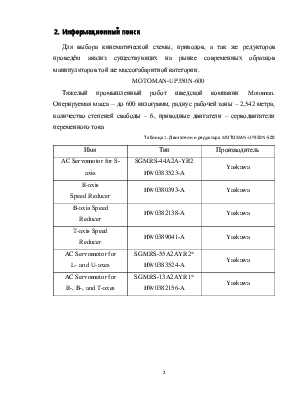
MOTOMAN-UP350N-600
Тяжелый промышленный робот шведской компании Motoman. Оперируемая масса – до 600 килограмм, радиус рабочей зоны – 2,542 метра, количество степеней свободы – 6, приводные двигатели – серводвигатели переменного тока
Таблица 1. Двигатели и редуктора MOTOMAN-UP350N-500
|
Имя |
Тип |
Производитель |
|
AC Servomotor for S-axis |
SGMRS-44A2A-YR2 HW0383523-A |
Yaskawa |
|
R-axis Speed Reducer |
HW0380393-A |
Yaskawa |
|
B-axis Speed Reducer |
HW0382138-A |
Yaskawa |
|
T-axis Speed Reducer |
HW0389041-A |
Yaskawa |
|
AC Servomotor for L- and U-axes |
SGMRS-55A2AYR2* HW0383524-A |
Yaskawa |
|
AC Servomotor for R-, B-, and T-axes |
SGMRS-13A2AYR1* HW0382156-A |
Yaskawa |
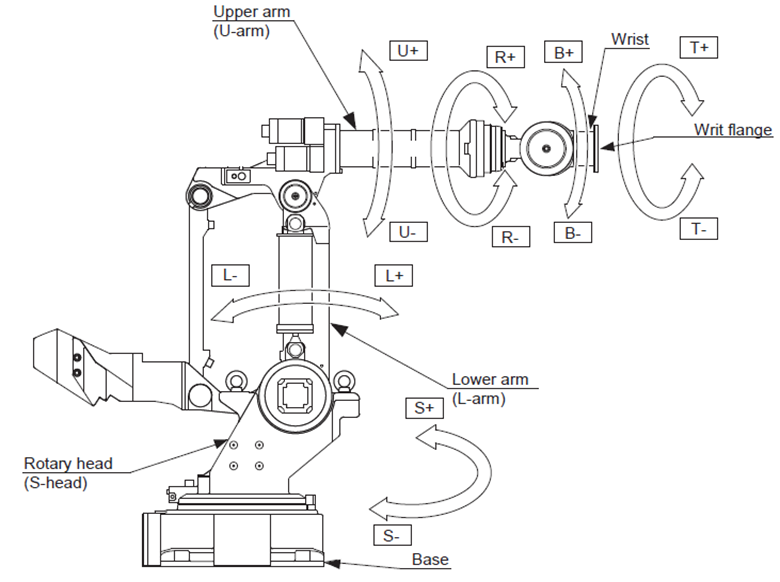
Рисунок 2. Название деталей и рабочие плоскости
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.