

























Департамент образования города Москвы
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
СРЕДНЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ПОЛИТЕХНИЧЕСКИЙ КОЛЛЕДЖ №39
210308 «Техническое обслуживание и ремонт РЭТ»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к комплексной курсовой работе
по спец. дисциплинам
Тема: «Автоматизация процесса сборки РЭУ с использованием замкнутой схемы импульсного регулирования скорости АД ЭП с помощью резистора в цепи ротора»
ККР.210308.157.СД.00.008.ПЗ
Студент ____________
Подпись Фамилия, имя, отчество
Руководитель ____________
Подпись Фамилия, имя, отчество
Консультант ____________
Подпись Фамилия, имя, отчество
Содержание
Введение……………………………………………………………………..3
Глава 1.
1.1. Обзор существующих схем ЭП и выбор схемы ЭП для управления процессом производства РЭТ………………………………………………4
1.2. Описание схемы использованием замкнутой схемы импульсного регулирования скорости АД ЭП с помощью резистора в цепи ротора ….7
1.3. Описание отдельных элементов автоматики, входящих в систему управления электроприводом……………………………………………….9
- Электродвигателя
- датчиков
Глава 2. Расчетная часть
2.1Проектирование САР скорости вращения вала двигателя…… …..12
2.2. Расчет на устойчивость в статическом режиме……………………...14
2.3. Расчет на устойчивость в динамическом режиме……………………22
2.3.1. Определение устойчивости по критерию Ляпунова……………….25
2.3.2. Расчет устойчивости по частотным критериям…………………….26
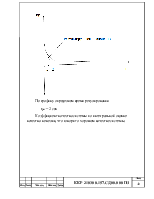
2.4. Определение переходной функции и посторенние графика переходного процесса……………………………………………………………………...28
2.5. Оценка качества спроектированной системы…………………...……31
3. Техника безопасности………………………………………………...….33
Заключение………………………………………………………………….36
Литература…………………………………………………………………..37
Введение
В настоящее время важным направлением научно-технического прогресса является комплексная автоматизация, включающая в себя: переход от автоматизации станков, агрегатов, установок к автоматизации работы линий, участков, цехов и заводов в целом; создание автоматизированных систем управления предприятием и целыми отраслями ; расширение применения промышленных роботов и гибких автоматизированных производственных систем.
Во многих отраслях науки и техники и технологиях возможность автоматизации управления определяет дальнейшее их развитие. Так без автоматизации невозможно построение энергетических систем (в частности, атомных), современных химических и металлургических производств, пилотируемых, беспилотных и космических летательных аппаратов и др.
Электропривод представляет собой электромеханическую систему, состоящую из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенную для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Современное машинное устройство или, как его называют иначе, производственный агрегат состоит из большого числа разнообразных деталей, отдельных машин и аппаратов, выполняющих различные функции. Все они в совокупности совершают работу, направленную на обеспечение определенного производственного процесса. Необходимо хорошо знать назначение отдельных элементов, составляющих машинное устройство, так как без этого невозможно проектировать и создавать машину, а также невозможно правильно обслуживать ее в эксплуатации.
Различают регулируемый ЭП , параметры движения которого могут изменяться по внешним командам, и нерегулируемый.
Создание условий, обеспечивающих требуемое протекание любого процесса, называется управлением. Для современной техники характерны значительное усложнение задач управления и рост объемов обрабатываемой и передаваемой информации, определяющие принципиальный качественный скачок автоматизации – широкое применение средств вычислительной техники, например автоматизированных систем с число-программным управлением. В данной курсовой работе будет произведен расчет на статическую и динамическую устойчивость элементарной четырехзвенной системы автоматического регулирования (обьект регулирования-датчик-регулятор-исполнительный механизм).
После выполнения расчета будет сделан вывод о статической и динамической устойчивости системы, правильно ли выбраны элементы в системе и создают ли они благоприятные условия для работы системы.
1.1. Обзор существующих схем ЭП и выбор схемы ЭП для управления процессом производства РЭТ
Характеристики разомкнутых ЭП, построенных по системе «преобразователь-двигатель» (П - Д), имеют относительно невысокую жесткость из-за влияния внутреннего сопротивления преобразователя. Для получения значительных диапазонов и высокой точности регулирования скорости требуются более жесткие характеристики, которые возможно обеспечить лишь в замкнутой системе П - Д. Кроме того, характеристики разомкнутой системы не обеспечивают точного регулирования (или ограничения) тока и момента, что также требует перехода к замкнутой системе П - Д
Замкнутые электроприводы с двигателями переменного тока до недавнего времени применялись относительно редко. В последние годы в связи с появлением разнообразных средств управления, и в первую очередь полупроводниковых силовых преобразователей, регулируемый электропривод переменного тока начал быстро развиваться. Рассмотрим некоторые примеры выполнения таких ЭП.
Прогрессивным явлением при создании средств управления и автоматизации технологических процессов являются разработка и выпуск комплектных ЭП (КЭП) постоянного и переменного тока. Комплектным является регулируемый ЭП, поставляемый заказчику вместе со всеми его функциональными элементами (см. рис.1), согласованными по всем своим характеристикам и параметрам уже на стадиях проектирования, конструирования и изготовления.
КЭП находят все более широкое применение во многих отраслях промышленности - станкостроительной, металлургической, машиностроительной и др. Их быстрое распространение определяется более низкой трудоемкостью при разработке и изготовлении, сокращением
времени на электромонтажные и наладочные работы, удобством в
эксплуатации.
КЭП различаются по напряжению питающей сети, числу двигателей (одно-, двух- или многодвигательные), виду и номинальным параметрам силового преобразователя, наличию или отсутствию реверса двигателя, виду основной регулируемой координаты (ЭП с регулируемыми скоростью, положением, натяжением, мощностью), диапазону и направлению регулирования скорости (однозонные и двухзонные), составу аппаратуры силовой цепи (с линейным контактором или без него), наличию или отсутствию торможения, способу связи с питающей сетью (связь через трансформатор, реактор или без них).
Комплектный электропривод переменного токапока имеет более узкую
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.