

Лабораторная работа 1.
Исследование мощного однотактного магнитного усилителя.
Основные понятия.
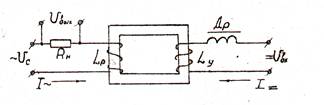 |
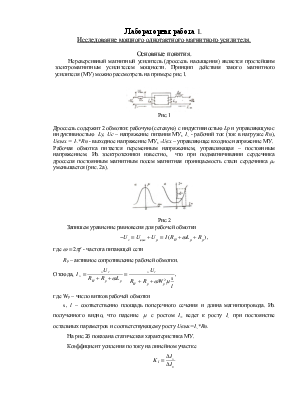
Рис.1
Дроссель содержит 2 обмотки: рабочую (сетевую) с индуктивностью Lp и управляющую с индуктивностью Ly, Uc – напряжение питания МУ, I~ - рабочий ток (ток в нагрузке Rн), Uвых = I~*Rн - выходное напряжение МУ, =Uвх – управляющее входное напряжение МУ.
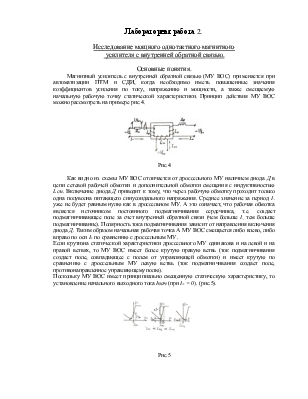
Рабочая обмотка питается переменным напряжением, управляющая – постоянным напряжением. Из электротехники известно, что при подмагничивании сердечника дросселя постоянным магнитным полем магнитная проницаемость стали сердечника µс уменьшается (рис. 2а).
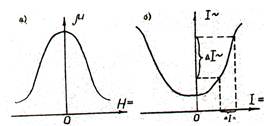 |
Рис.2
Запишем уравнение равновесия для рабочей обмотки
~![]() ,
,
где ![]() - частота питающей сети
- частота питающей сети
Rp – активное сопротивление рабочей обмотки.
Отсюда,  ,
,
где Wp – число витков рабочей обмотки
s, l – соответственно площадь
поперечного сечения и длина магнитопровода. Из полученного видно, что падение ![]() с ростом I=
ведет к росту I~ при постоянстве
остальных параметров и соответствующему росту Uвых=I~*Rн.
с ростом I=
ведет к росту I~ при постоянстве
остальных параметров и соответствующему росту Uвых=I~*Rн.
На рис.2б показана статическая характеристика МУ.
Коэффициент усиления по току на линейном участке
Если построить аналогично статическую характеристику ~Uвых = f(U=) , то можно будет получить коэффициент усиления по напряжению
Произведение Ku*Ki=Kp даст коэффициент усиления МУ по мощности. МУ по схеме рис.1 имеет существенный недостаток – в управляющей обмотке наводится переменная ЭДС от рабочей обмотки. Для устранения влияния переменной ЭДС на источник используется заградительный дроссель ДР с большой индуктивностью.
На практике для устранения этого недостатка используют двухстержневую схему (рис.3), в которой управляющая обмотка состоит из 2-х встречно включенных полуобмоток с полной компенсацией наведенной ЭДС.
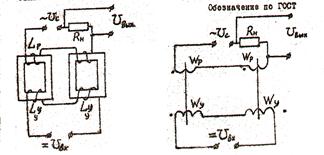 |
Рис.3
Таким образом принцип действия МУ может быть сформулирован так: малый по мощности управляющий сигнал постоянного тока перераспределяет мощное сетевое напряжение между сетевой обмоткой и нагрузочным сопротивлением.
Теоретическая формула для расчета статической характеристики МУ, изображенного на рис.3 выведена из теории идеального МУ в
где Wy – число витков управляющей обмотки.
Лабораторная работа 2.
Исследование мощного однотактного магнитного
усилителя с внутренней обратной связью.
Основные понятия.
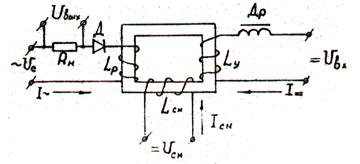 |
Рис.4
Как видно из схемы МУ ВОС отличается от дроссельного МУ наличием диода Д в цепи сетевой рабочей обмотки и дополнительной обмотки смещения с индуктивностью Lсм. Включение диода Д приводит к тому, что через рабочую обмотку проходит только одна полуволна питающего синусоидального напряжения. Среднее значение за период I~ уже не будет равным нулю как в дроссельном МУ. А это означает, что рабочая обмотка является источником постоянного подмагничивания сердечника, т.е. создает подмагничивающее поле за счет внутренней обратной связи (чем больше I~ тем больше подмагничивание). Полярность тока подмагничивания зависит от направления включения диода Д. Таким образом начальная рабочая точка А МУ ВОС смещается либо влево, либо вправо по оси I= по сравнению с дроссельным МУ .
Если крутизна статической характеристики дроссельного МУ одинакова и на левой и на правой ветвях, то МУ ВОС имеет более крутую правую ветвь (ток подмагничивания создает поле, совпадающее с полем от управляющей обмотки) и имеет крутую по сравнению с дроссельным МУ левую ветвь (ток подмагничивания создает поле, противонаправленное управляющему полю).
Поскольку МУ ВОС имеет принципиально смещенную статическую характеристику, то установление начального выходного тока Iнач (при I= = 0). (рис.5).
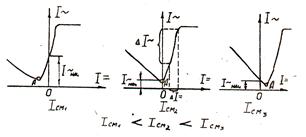 |
Рис.5
Коэффициент усиления по току МУ ВОС также как и в дроссельном МУ определяется из линейного участка статической характеристики
Из рис.5 видно, что Ki правой ветви больше, чем левой. На практике используется более крутая ветвь статической характеристики и 2 сердечника для устранения наводок от рабочей обмотки в обмотках управления и смещения. Для расчета теоретических коэффициентов усиления МУ ВОС по току Ki, напряжению Ku и мощности Kp на крутой ветви статической характеристики используют формулы:
где f – частота тока сети; Lp, Rp – индуктивность и активное сопротивление рабочей обмотки; Wy, Wp – число витков управляющей и рабочей обмоток соответственно; Ry – активное сопротивление управляющей обмотки; Rд, n – прямое сопротивление диодов и их последовательно соединенных соответственно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.