Содержание
Исходные данные и задачи расчета 3
Структурный анализ механизма 4
Кинематический расчет механизма для рабочего хода
Определение скоростей звеньев механизма 5
Определение ускорений звеньев механизма 6
Кинематический расчет механизма для холостого хода
Определение скоростей звеньев механизма 7
Определение ускорений звеньев механизма 8
Кинетостатический расчёт механизма для рабочего хода
Определение реакций в кинематических парах группы 5 -6 9
Определение реакций в кинематических парах группы 3 -4 11
Определение реакций в кинематических парах группы 1 -2 12
Кинетостатический расчет механизма пресса для холостого хода
Определение реакций в кинематических парах группы 5 -6 15
Определение реакций в кинематических парах группы 3 -4 16
Определение реакций в кинематических парах группы 1 -2 17
Вывод 18
Список литературы 19
СТРУКТУРНЫЙ АНАЛИЗ
Цель: Изучить строения механизмов, определить их степень подвижности и класс.
1) Число подвижных звеньев n =5
2) Степень подвижности
![]()
![]()
3) За начальное звено принимаем звено 2
![]()
КИНЕМАТИЧЕСКИbЙ РАСЧЕТ
План скоростей
![]() - масштабный коэффициент
- масштабный коэффициент
![]()
Угловая скорость ω2 кривошипа определяется по формуле:
ω =![]() ,
,

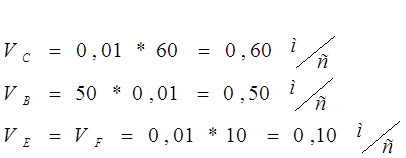
Для определения истинных величин скоростей нужно умножить на масштабный коэффициент:
|
№ положений |
ω |
VC |
VB |
VE |
ω2 |
|
2 |
60 |
0,60 |
0,50 |
0,10 |
2,06 |
План ускорений
![]() Векторное
равенство:
Векторное
равенство:
![]()
![]()
![]() ,
, ![]() -абсолютное ускорение точки ;
-абсолютное ускорение точки ;
![]()
Масштабный коэффициент:
|
№ положений |
φ° |
|
|
|
|
|
2 |
60 |
0.98 |
0.90 |
0.34 |
0.50 |
ХОЛОСТОЙ ХОД
СКОРОСТЬ:
Для определения истинных величин скоростей нужно умножить на масштабный коэффициент:
|
№ положений |
ω |
VC |
VB |
VE |
ω2 |
|
10 |
300 |
0,80 |
0,50 |
0,54 |
2,06 |
УСКОРЕНИЕ:
Для определения истинных величин скоростей нужно умножить на масштабный коэффициент:
|
№ положений |
φ° |
|
|
|
|
|
10 |
30 |
0.50 |
0.45 |
1.05 |
0.50 |
Кинетостатический расчет механизма
Рабочий ход
Определение реакций в кинематических парах группы 5 – 6.
Рассматриваем равновесие группы
![]()
G5- сила тяжести поршня звена 5,
![]()
![]()
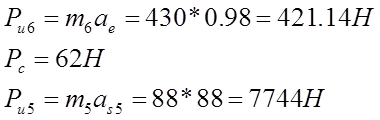
G6 – сила тяжести ползуна 6,
![]()
Pи6 –сила инерции ползуна, где
Pc-сила сопротивления.
![]() Pи6
– сила инерции шатуна
Pи6
– сила инерции шатуна
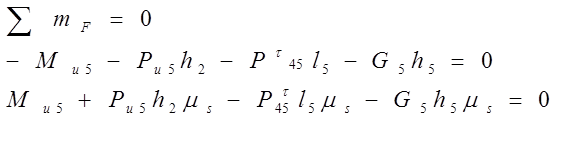
Кроме силы на шатун действует еще и момент сил инерции
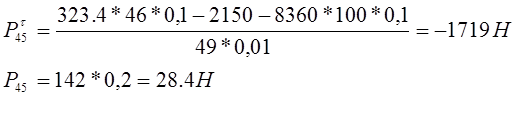
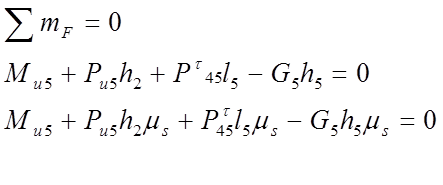 Тангенциальная
составляющая Р45 определяется из суммы моментов сил,
действующих на шатун относительно точки F.
Тангенциальная
составляющая Р45 определяется из суммы моментов сил,
действующих на шатун относительно точки F.
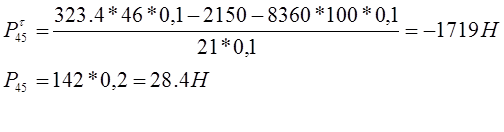
h2=46 h1=100
Определяем реакции в кинематических парах группы 3-4
![]()
G3 – сила тяжести кулисы;
![]()
Р14 – реакция стойки на кулису;
Ри3- сила инерции кулисы
![]()
![]()
Определение реакций в кинематических парах исходного механизма группы 1 – 2.
![]()
Рассмотрим равновесие:
![]()
Р32 – реакция ползуна на кривошип. Пo величине равна Р23 и противоположена по направлению.
G2 – сила тяжести кривошипного колеса
![]()
Р12 – реакция стойки на кривошип.
Рур – уравновешивающая сила – реакция зуба отброшенной шестерни с числом зубцов Z.
h1=20, h=24
Уравновешивающий момент можно определить по уравновешивающей силе.
![]()
![]()
|
№ положений |
Р12 |
Р14 |
Р45 |
Р23 |
Рур |
Мур |
Р16 |
|
2 |
12,8 |
5 |
28,4 |
154,5 |
128,75 |
309 |
24,4 |
Холостой ход
Определение реакций в кинематических парах группы 5 -6.
![]()
![]()
![]()
![]()
![]()
![]()
Определение реакций в кинематических парах группы 3-4.
![]()
h2=50 h1=44 h=26
Определение реакций в кинематических парах исходного механизма 1 -2.
![]()
![]()
h=10 h1=25
![]()
|
№ положений |
Р12 |
Р14 |
Р45 |
Р23 |
Рур |
Р16 |
|
10 |
7,4 |
31 |
31 |
154,5 |
61,8 |
44.2 |
Вывод:
В ходе выполнения курсового проекта был проведен кинематический анализ механизма и построены планы скоростей и ускорений для рабочего и холостого хода механизма (2 и 10 положений).
В результате кинетостатического расчета были получены значения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.