



Лабораторная работа №2.
ИССЛЕДОВАНИЕ ИНДУКТИВНОГО СЧЕТЧИКА.
Цель работы: изучение принципа работы, конструкции и исследование характеристик индуктивного датчика.
СОДЕРЖАНИЕ РАБОТЫ.
Индуктивный датчик является воспринимающим элементом систем автоматического регулирования и контроля.
Датчиком системы автоматического регулирования называется такой элемент, который воспринимает первичную информацию автоматизируемого процесса и преобразует её в удобный для дальнейшего использования вид энергии.
Большинство датчиков первичной информации осуществляет преобразование линейного, углового перемещений в электрическую энергию.
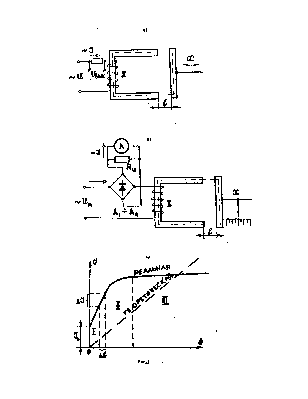
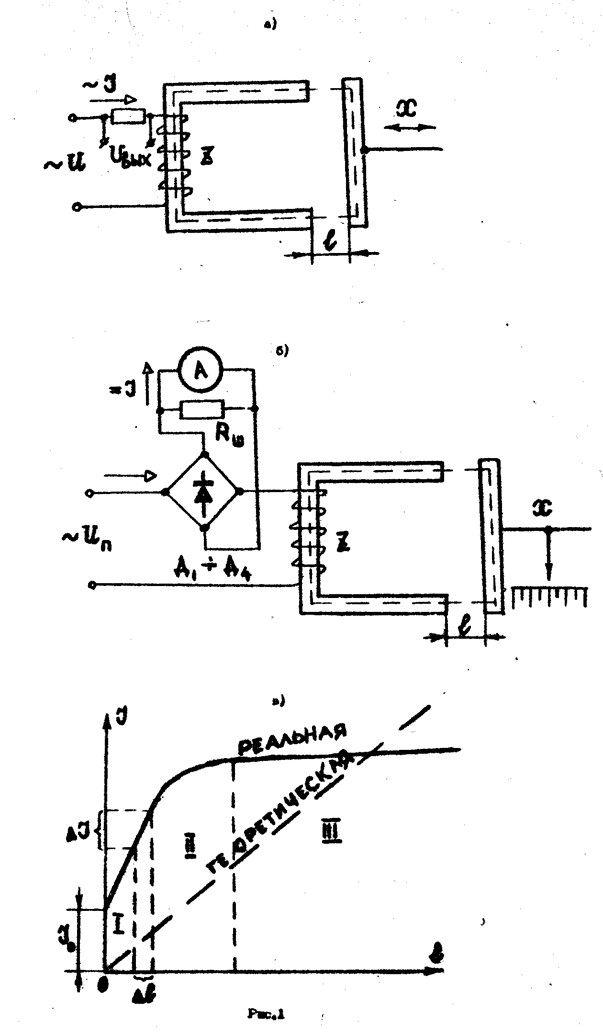
Индуктивный датчик представляет собой дроссель с разомкнутым сердечником (рис.1,а). Магнитопровод является разомкнутым и часть его в виде замыкающего сердечника перемещается механически от автоматизируемого технологического процесса на расстояние l. Рабочая обмотка датчика питается переменным напряжением ~U.
Рассмотрим основные соотношения, характеризующие работу датчика.
Из закона Ома определим в цепи рабочей обмотки:
где Z – полное сопротивление рабочей обмотки.
![]() (1)
(1)
где, r – активное сопротивление рабочей обмотки;
XL=ωL – индуктивное сопротивление рабочей обмотки;
L – индуктивность рабочей обмотки;
ω=2Пf – круговая частота (f=50Гц).
Из электрики известно, что величина индуктивности
рабочей обмотки связана с параметрами сердечника магнитопровода следующим
соотношением:  (2)
(2)
где W – число витков рабочей обмотки;
 -
магнитное сопротивление магнотопровода;
-
магнитное сопротивление магнотопровода;
l1 – длина магнитопровода;
μ – магнитная проницаемость материала магнитопровода;
s – площадь поперечного сечения.
Магнитное сопротивление магнитопровода индуктивного
датчика состоит из двух составляющих. ![]() ,
,
где,  -
магнитное сопротивление стальной части магнитопровода
-
магнитное сопротивление стальной части магнитопровода
 -
магнитное сопротивление воздушного зазора;
-
магнитное сопротивление воздушного зазора;
lc – длина стальной части магнитопровода;
μс – магнитная проницаемость стали;
μb ≈1 – магнитная проницаемость воздуха;
Поскольку всегда μс>> μb , то Rc<<Rb.
Поэтому . (3)
. (3)
В индуктивном датчике, кроме того, индуктивное сопротивление
намного больше активного ![]() .
.
Поэтому (1) перепишется в виде Z≈ωL, (4)
Уравнение (2) и (3) подставим в (4)  .
.
По закону Ома определяем модуль тока  , (5)
, (5)
где  -
коэффициент передачи или чувствительность индукционного датчика. Таким
образом, ток в рабочей обмотке индукционного датчика линейно зависит от
величины перемещения подвижного сердечника l.
-
коэффициент передачи или чувствительность индукционного датчика. Таким
образом, ток в рабочей обмотке индукционного датчика линейно зависит от
величины перемещения подвижного сердечника l.
На рис.1,б показана принципиальная схема исследования характеристик индукционного датчика. Её отличаем является наличие выпрямительного моста D1 – D4 и шунта Rш для измерения тока магнитоэлектрическим прибором.
На рис.1, в показана теоретическая зависимость ( пунктирная прямая) тока в рабочей обмотке от величины перемещения l подвижного сердечника. Реальная характеристика (сплошная кривая на рис.1,в) отличается от теоретической наличием тока холостого хода J0 (при l=0) и нелинейностью.
При этом можно выделить 3 основных участка:
1 – рабочий, с максимальной крутизной и линейностью k=const;
2 – переходный, с явно выраженной нелинейностью k=var;
3 – насыщения, с максимальной крутизной и линейностью k=const≈0.
Индуктивные датчики используют только на рабочем участке, поскольку при максимальной крутизне наблюдается и её постоянство.
Коэффициент передачи (чувствительность или коэффициент крутизны) считают в дифференциальной форме:
 , или практически
, или практически  по приращениям.
по приращениям.
Индуктивные датчики часто используют совместно с измерительными схемами при автоматизации измерений и регулировании величин давлений, расходов жидкостей или газов. Достоинствами индуктивных датчиков являются простота устройства, возможность работы на переменном токе промышленной частоты и отсутствие подвижных частей непосредственно в электрической измерительной цепи. К недостаткам относятся наличие тока холостого хода и ограниченный участок линейности, а так же гистерезис статической характеристики.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ.
1. изучить принципиальную схему исследования статических характеристик индуктивного датчика.
2. Снять статическую характеристику датчика при Uп=20В (переключатель предела измерительного прибора в положение «90»), при прямом и обратном ходе подвижного сердечника в диапазоне l от 0 до 16 мм.
3. Повторить пункт 2для Uп=6,3В (переключатель предела измерительного прибора в положение «30»).
4. Результаты экспериментальных наблюдений занести в протокол испытаний.
Протокол испытаний
|
Uп=20В |
Uп=6,3В |
||||||||||||||||||
|
Прямой ход |
Обратный ход |
Прямой ход |
Обратный ход |
||||||||||||||||
|
J,мА |
|||||||||||||||||||
|
l,мм |
0 |
1 |
2 |
… |
16 |
16 |
15 |
… |
1 |
0 |
0 |
1 |
2 |
… |
16 |
16 |
15 |
… |
0 |
СОДЕРЖАНИЕ ОЧЕТА.
1. Принципиальная схема исследования статических характеристик.
2. Принцип действия, назначение, достоинства и недостатки индуктивного датчика ( написать вкратце).
3. Протокол испытаний.
4. Статические характеристики индуктивного датчика по протоколу №1, построенные на миллиметровой бумаге в одном масштабе (для прямого и обратного хода).
5. Для двух указанных преподавателем участков рассчитать коэффициенты передачи индуктивного датчика с интервалом ∆l= 1мм.
6. Выводы по наиболее эффективному использованию индуктивного датчика при изменении напряжения питания и участка использования статической характеристики.
КОНТРОЛЬНЫЕ ВОПРОСЫ.
1. Достоинства и недостатки индуктивных датчиков.
2. От чего зависит наклон статической характеристики индуктивного датчика?
3. Каким образом увеличить продолжительность первого рабочего участка?
4. Какие упрощающие допущения используются при выводе рабочей формулы?
5. От чего зависит величина тока холостого хода и как её уменьшить?
6. Как можно оценить величину нелинейности статической характеристики?
7. Привести и нарисовать конкретный пример использования индуктивного датчика при автоматизации строительных, либо машиностроительных процессов.
ЛИТЕРАТУРА.
1. Майзель М.М. «Основы автоматики и автоматизации производительных процессов». М.,1964.
2. Колосов С.П., Калмыков И.В., Нефедова В.И. «Элементы автоматики». М., 1970.
3. Аранович Б.И., Шамрай Б.В. «Электромагнитные устройства автоматики». М., 1965.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.