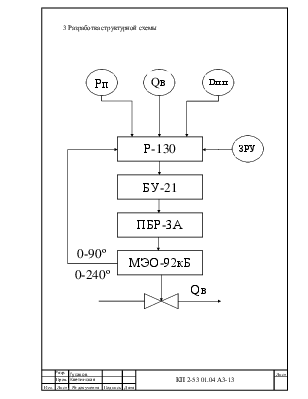
3 Разработка структурной схемы

![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
3.1 Характеристика закона регулирования
ПИ-регулятор - это параллельно соединенные П- и И- регуляторы. Выходной сигнал ПИ-регулятора (u(t)) зависит и от ошибки регулирования (e(t)), и от интеграла от этой ошибки.
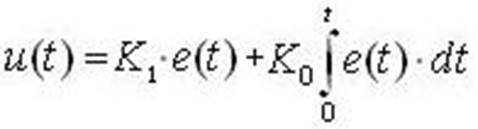
K1 - коэффициент усиления пропорциональной части,
K0 - коэффициент усиления интегральной части
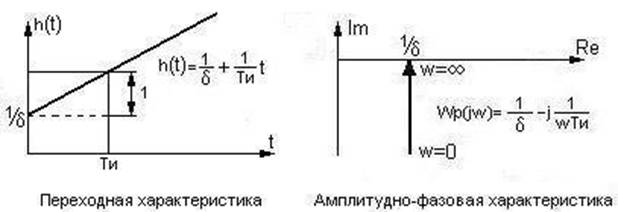
Передаточная функция ПИ-регулятора: Wр(S)=K1+K0/S
Переходная характеристика: h(t)=K1+K0*t, t³0
Так как ПИ-регулятор можно рассматривать как два регулятора (П- и И-), соединенные параллельно, то усилительные свойства ПИ-регулятора характеризуют два параметра:
1) предел пропорциональности d=1/K1 - величина, обратная K1 (см. П-регулятор)
2) время изодрома Ти=1/K0 - величина, обратная K0 (см. И-регулятор)
Динамические характеристики ПИ-регулятора
В системе регулирования с ПИ-регулятором так же, как и в системе с И-регулятором, отсутствует статическая ошибка, но динамические характеристики лучше.
Достоинствами данного регулятора является:
1. Интегральная часть является накопительной, и таким образом позволяет осуществить то, что ПИ-регулятор учитывает в данный момент времени предыдущую историю изменения входной величины.
2. Достаточно прост в настройке т.к. настраиваются только два параметра, а именно коэффициент усиления Кр и постоянная времени интегрирования Ti. В таком регуляторе имеется возможность оптимизации величины отношения Кр/Ti—min, что обеспечивает управление с минимально возможной среднеквадратичной ошибкой регулирования.
3. Малая чувствительность к шумам в канале измерения (в отличие от ПИД-регулятора).
Однако ПИ-регулятор имеет и ряд недостатков:
1. Два параметра настройки (Кр и Ти) поэтому его сложнее настроить и рассчитать;
2. Качество регулирования хуже, чем у ПИД-регулятора. Введение И составляющей приводит в замкнутой АСР к отставанию системы на 90 градусов, к приближению графика КЧХ системы к опасной точке координат (0;-1).
Следовательно ПИ-регулятор нет смысла применять на инерционных объектах.
3.2 Описание Ремиконт Р-130
Ремиконт Р-130 – это компактный малоканальный, многофункциональный микропроцессорный контроллер, предназначенный для автоматического регулирования и логического управления технологическими процессами в различных отраслях промышленности.
Ремиконт Р-130 имеет две модели – регулирующую и логическую. Регулирующая модель предназначена для решения задач автоматического, логическая модель – для реализации логических программ шагового управления.
Как регулирующая, так и логическая модель ремиконта Р – 130 содержит средства оперативного управления, расположенные на лицевой панели контроллера. Эти средства позволяют вручную изменять режимы работы, устанавливать задание, управлять ходом выполнения программы, вручную управлять исполнительными механизмами, контролировать сигналы и индицировать ошибки.
Ремиконт – программируемое устройство, но для работы с ним не нужны программисты. Процесс программирования сводится к тому, что путем последовательного нажатия нескольких клавиш из библиотеки, зашитой в постоянной памяти, извлекаются нужные алгоритмы. Эти алгоритмы объединяются в систему заданной конфигурации, и в них устанавливаются требуемые параметры настройки.
С помощью встроенной батареи запрограммированная информация сохраняется, при отключении питания, она может быть записана в ПЗУ.
Ремиконт Р – 130 представляет собой комплекс технических средств. В его состав входит центральный микропроцессорный блок контролера БК-1 и ряд дополнительных блоков. БК-1 преобразует аналоговую и дискретную информацию в цифровую форму, ведет обработку цифровой информации и вырабатывает управляющие воздействия. Дополнительные блоки используются для предварительного усиления сигналов термопар, термометров сопротивления и др., формирование дискретных выходных сигналов на напряжение 220В, организации внешних переключений и блокировок.
В Ремиконт встроены развитые средства самодиагностики, сигнализации и идентификации неисправности, в том числе при отказе аппаратуры, сбои в ОЗУ и. т.п.
В регулирующей модели Ремиконта Р-130 предусмотрено:
1) до 4 независимых контуров регулирования;
2) разнообразное сочетание (по заказу) аналоговых и дискретных входов- выходов (35 модификаций);
3) 76 защитных в ПЗУ алгоритмов непрерывной и дискретной обработки информации;
4) до 99 алгоблоков со свободным их заполнением любыми алгоритмами
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.