При фиксированном размере динамических рядов 100000 экземпляров исследуем влияние способа формирования динамического ряда на точность идентификации с помощью функции PEM( [10с.; 0.0001с.], [100с.; 0.001с.], [1000с.; 0.01с.], [10000с.; 0.1с.] )
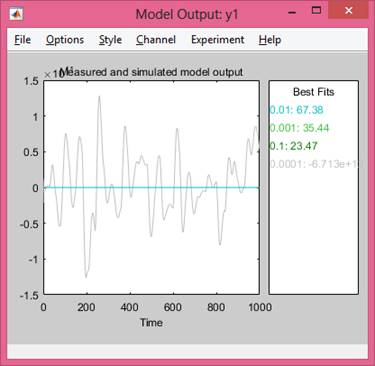


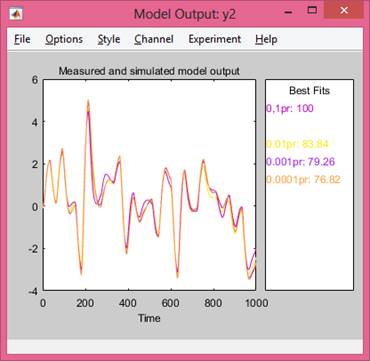
Рисунок 29– изменение bestfitPEM и processmodels при изменении шага моделирования системы и времени моделирования
Таблица 3 -Результаты идентификации
|
№ |
Параметры иссл-го сигнала |
Шаг мод-я системы, с. |
Время моделирования |
Разм-сть дин. ряда |
Порядок модели |
Метод (PrMd, N4SID, PEM) |
Точность ид-ииBestFit, % Y1 |
Точность ид-ииBestFit, % Y2 |
|
1 |
20/40 |
0,1 |
10000 |
100000 |
12 |
PEM |
23.47 |
49.51 |
|
2 |
20/40 |
0,01 |
1000 |
100000 |
12 |
PEM |
67.38 |
84.35 |
|
3 |
20/40 |
0,001 |
100 |
100000 |
12 |
PEM |
35.44 |
50.51 |
|
4 |
20/40 |
0,0001 |
10 |
100000 |
12 |
PEM |
-6.71e+12 |
-6.53e+12 |
|
5 |
20/40 |
0,1 |
10000 |
100000 |
12 |
Pr mod |
100 |
100 |
|
6 |
20/40 |
0,01 |
1000 |
100000 |
12 |
Pr mod |
92.93 |
83.74 |
|
7 |
20/40 |
0,001 |
100 |
100000 |
12 |
Pr mod |
91.34 |
79.26 |
|
8 |
20/40 |
0,0001 |
10 |
100000 |
12 |
Pr mod |
58.79 |
76.82 |
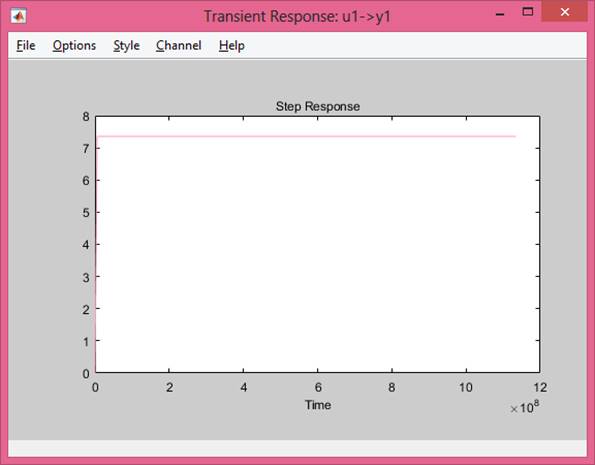
Рисунок 30 – Переходная характеристика УЛП по 1 входу и 1 выходу
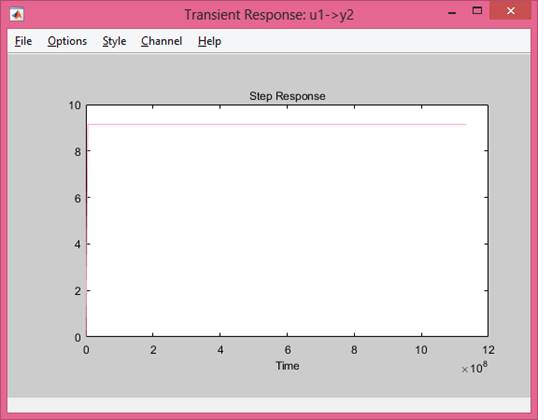
Рисунок 31 – Переходная характеристика УЛП по 1 входу и 2 выходу
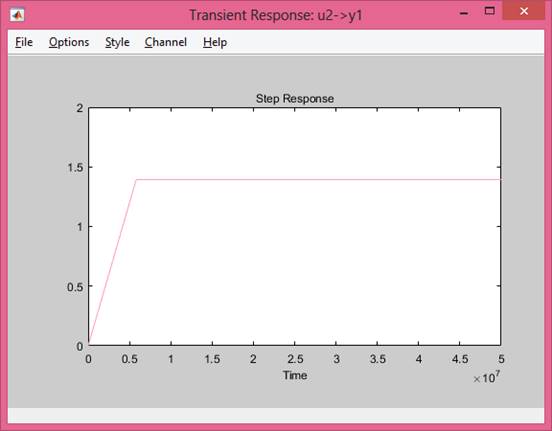
Рисунок 32 – Переходная характеристика УЛП по 2 входу и 1 выходу
Рисунок 33 – Переходная характеристика УЛП по 2 входу и 2 выходу
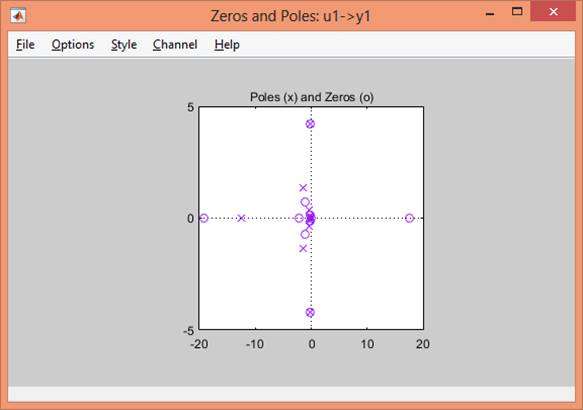
Рисунок 34 – Нули и полюса по 1 входу и 1 выходу

Рисунок 35 – Нули и полюса по 1 входу и 1 выходу
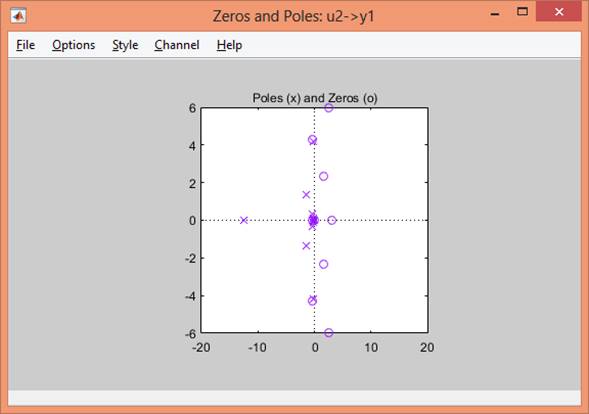
Рисунок 36 – Нули и полюса по 2 входу и 1 выходу
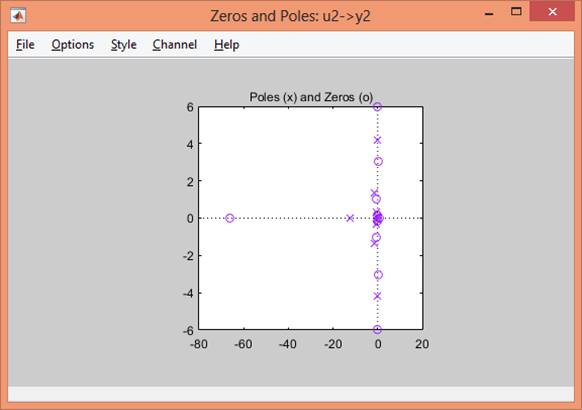
Рисунок 36 – Нули и полюса по 2 входу и 2 выходу
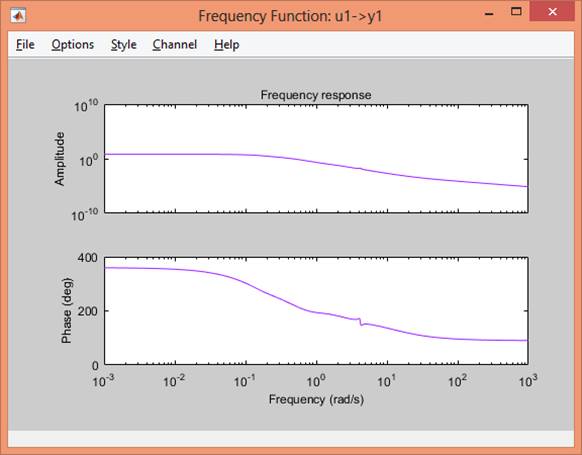
Рисунок 37 – Частотные характеристики по 1 входу и 1 выходу
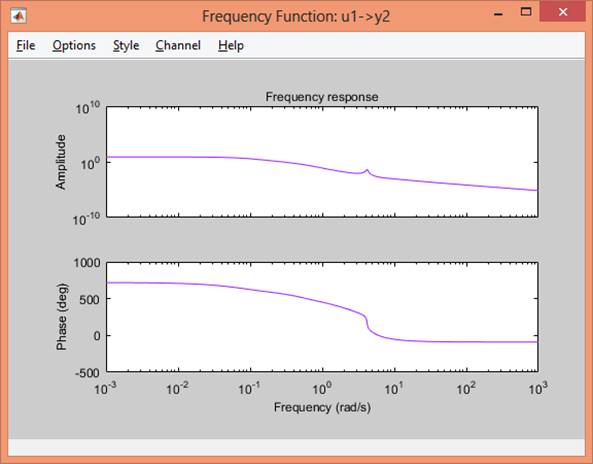
Рисунок 38 – Частотные характеристики по 1 входу и 2 выходу
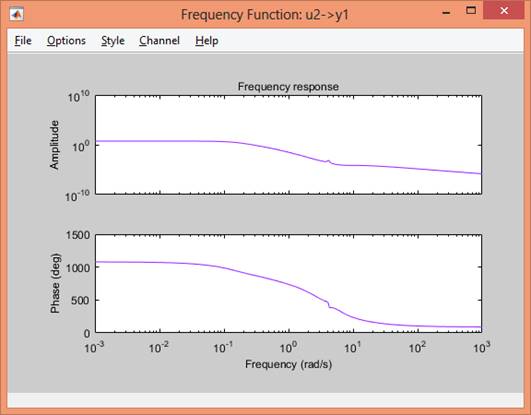
Рисунок 39 – Частотные характеристики по 2 входу и 1 выходу
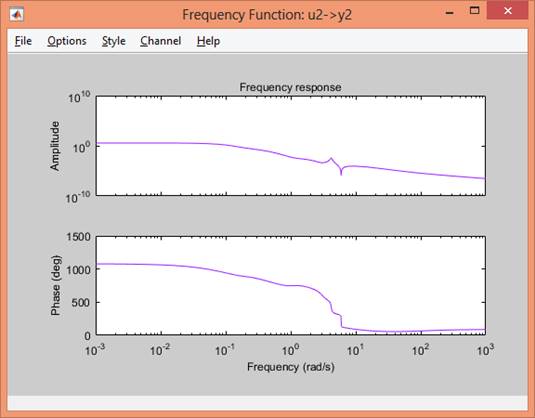
Рисунок 40 – Частотные характеристики по 2 входу и 2 выход
Вывод для 2 задания курсовой: в этой части курсовой работы мы проверяли точность идентификации модели по 3-м методам N4SID, PEM, ProcessModels. Как показывает эксперимент данные вычисленные методом ProcessModelsточность высокая.
Задание 3:
Цель: исследовать влияние размерности динамических рядов на точность идентификации в условиях действия случайных помех различной интенсивности. Научиться добиваться в данных условиях максимальной точности идентификации. Прийти к выводу и подтвердить результатами исследования, что методом улучшения точности идентификации в условиях действия помех является увеличение размерности динамического ряда. Сделать вывод о точности идентификации в условиях действия слабых и сильных случайных помех.
Для трех рекомендуемых значений размерности динамических рядов (1000, 10000, 100000, шаг ряда 0.01с.) и интенсивности помех (0.5, 5, 50%) проведем идентификацию методами PEM и ProcessModels с максимально возможной точностью при выбранном порядке модели УЛП.
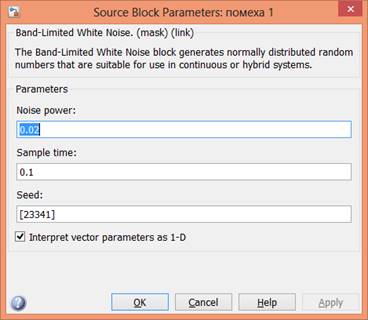
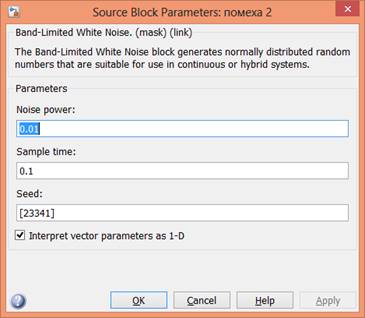
Рисунок 30 – настройки белого шума для 50%
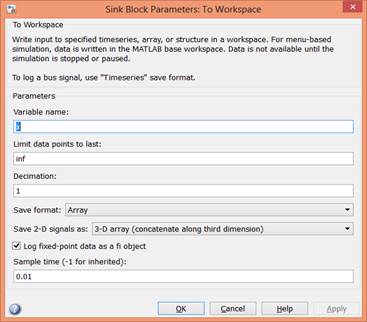
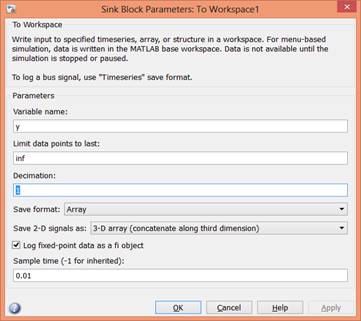
Рисунок 31 – Настройки блока “toworkspace”
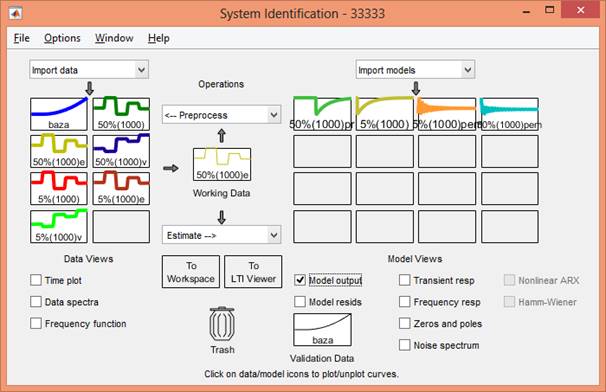
Рисунок 32 – окно ident
На рисунке 32 показано, что мы идентификацию модели проводили по первой половине динамического ряда, а вычисление метрик BestFit точности идентифицированной модели "идеальной" ‑ по базовому динамическому ряду (шаг 0.01с., длительность 1000с.) в области ValidationData.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.