Подберем оптимальные настройки блока спектра сигнала и построим графики исследовательского сигнала:
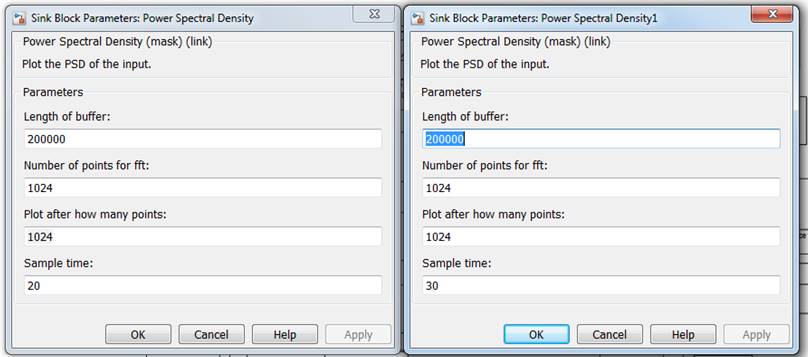
Рисунок 16 – Окно настройки блоков спектра сигнала
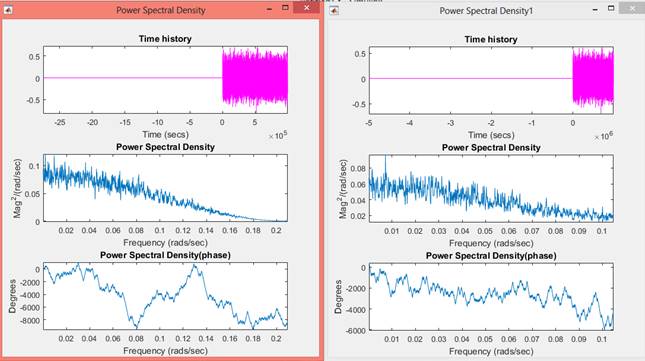
Рисунок 17 – Спектры входных сигналов
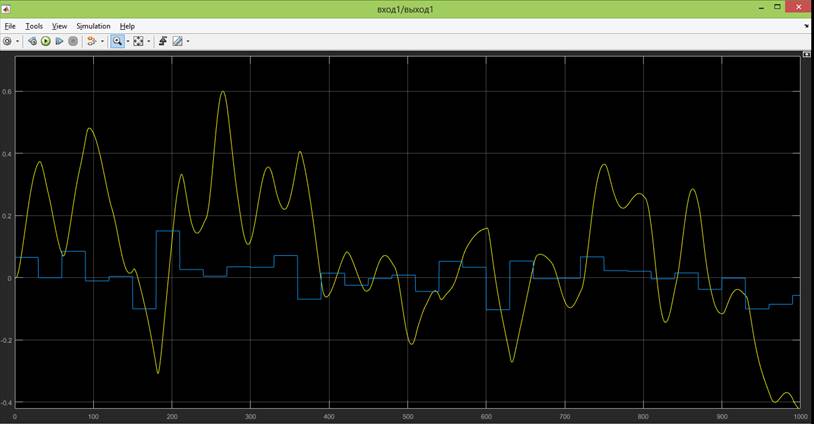
Рисунок 18 – График вход/выходпервого канала без помех (1000c)

Рисунок 19– График вход/выход второго канала без помех (1000 с)
Для первого выхода размах примерно равен 0,9 и второго выхода размах примерно равен 2,4. Мощность шума при котором размах помехи будет занимать 50% от размаха амплитуды сигнала без помехи то есть в нашем случае 0,45 и 1,2 соответсвенно.
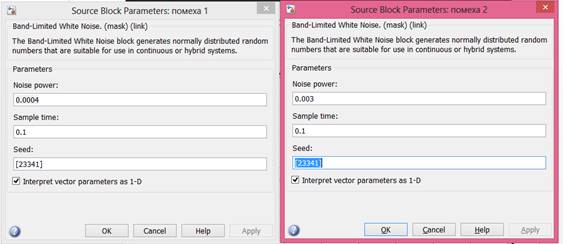
Рисунок 20 – мощность белого шума для 50%
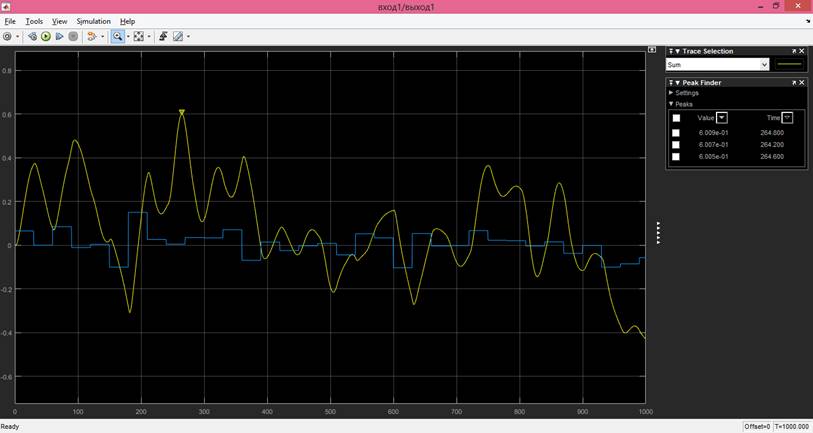
Рисунок 20 – График вход/выход первогоканала с помехой(0.5%)
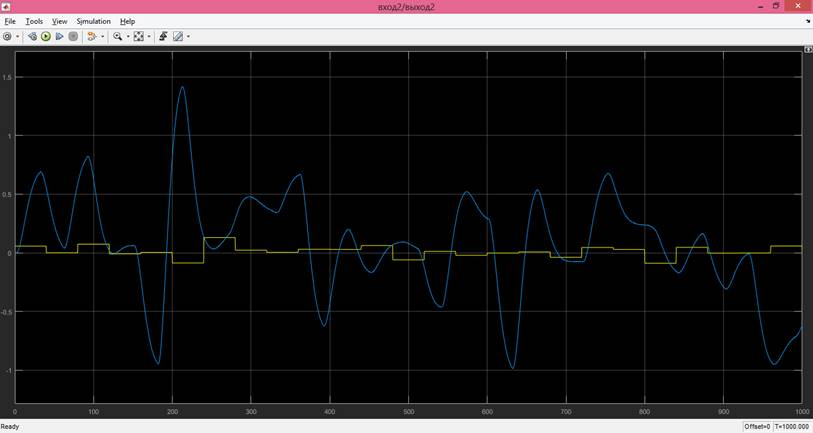
Рисунок 21 – График вход/выход второго канала с помехой(0.5%)
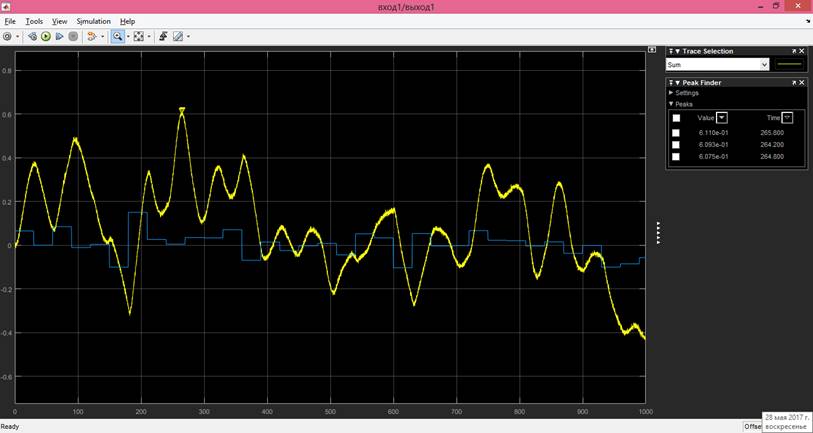
Рисунок 22 – График вход/выход первого канала с помехой (5%)
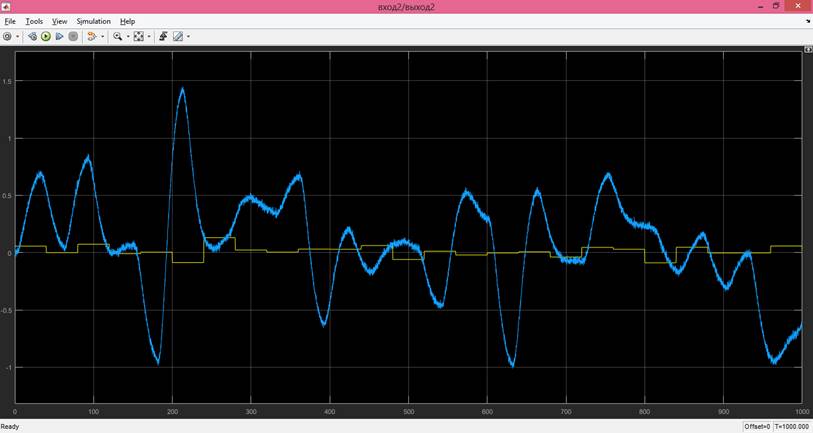
Рисунок 23 – График вход/выход второго канала с помехой (5%)

Рисунок 24 – График вход/выход первого канала с помехой(50%)
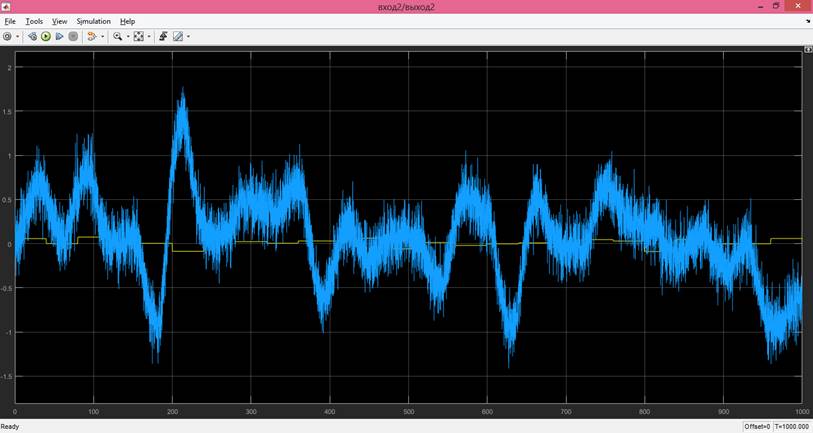
Рисунок 25 – График вход/выход второго канала с помехой (50%)
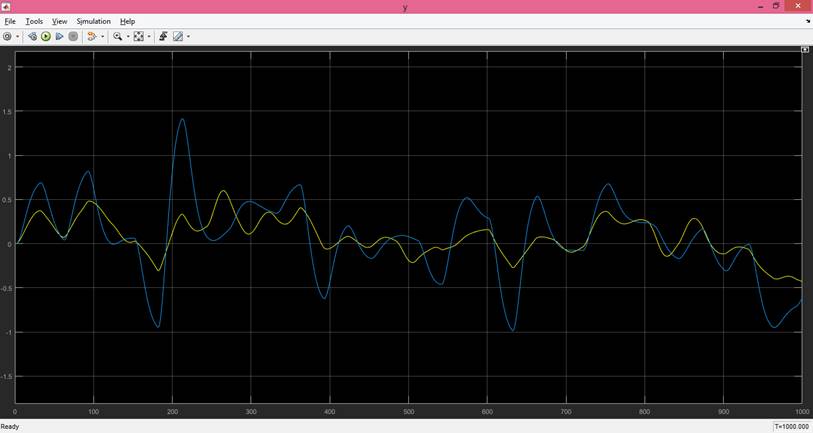
Рисунок 26 – График выходного сигнала без помех

Рисунок 27 – График выходного сигнала с помехой (0.5%)
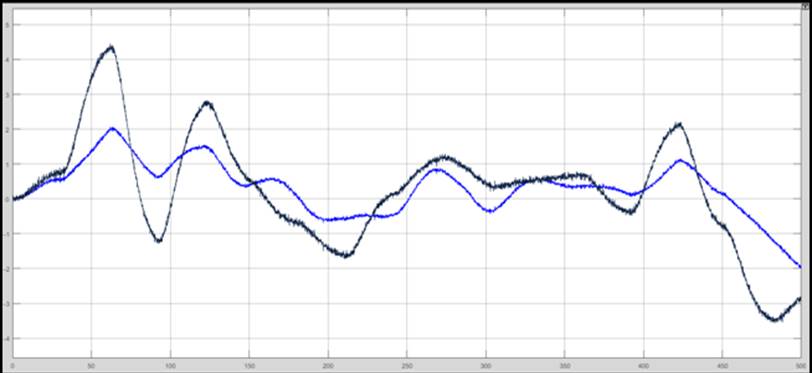
Рисунок 28 – График выходного сигнала с помехой (5%)
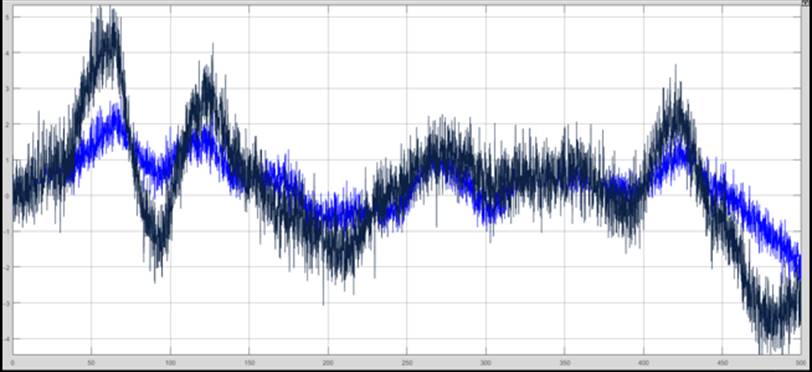
Рисунок 29 – График выходного сигнала с помехой (50%)
Импортируем следующие динамические ряды в SystemIdentification, где x0 иy0, x4иy4, x8иy8 – без помех; x1иy1,x5иy5,x9иy9 – 0.5% помеха; x2иy2, x6иy6,x10иy10 – 5% помеха; x3иy3,x7иy7,x11иy11 – 50% помеха.
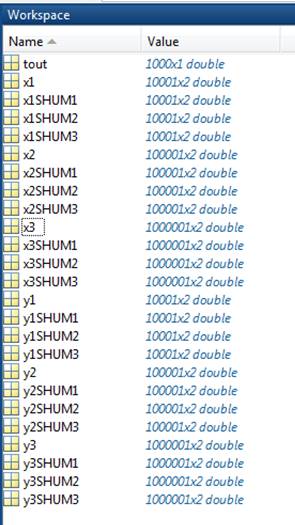
Рисунок 30 – Динамические ряды
Вывод к первой части курсовой работы:
В первой части курсовой работы мы научились формировать модель для имитации динамических рядов многомерного объекта, обеспечивающих максимальную точность идентификации в условиях действия случайных помех. Сформировали 12 динамических рядов размерностью 500, 5000, 50000 (с разрешения преподавателя можно уменьшить размерность на порядок) без случайного шума и с шумом величиной 0.5, 5, 50%. Полученные динамические ряды идентичны. Шум на входное воздействие не влияет.
Задание 2: Исследование точности идентификации динамического ряда без помех с помощью ProcessModels и функций N4SID и PEM.
Импортируем динамический ряд размерностью 100000 в SystemIdentification
Проведем идентификцию параметров модели известной структуры через ProcessModels.
a) b)
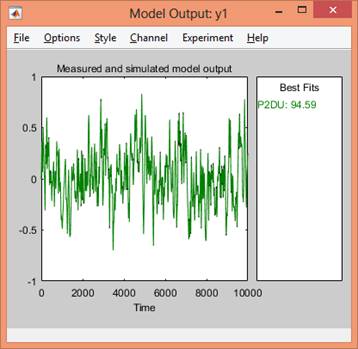
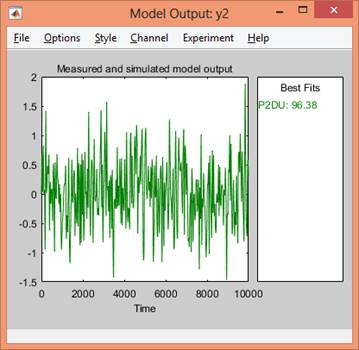
Рисунок 18 – точность идентификации в processmodels
a) y1 b) y2
Далее проведем предварительную идентификацию всего динамического ряда с помощью функции N4SID и найдем наиболее приемлемый порядок модели.
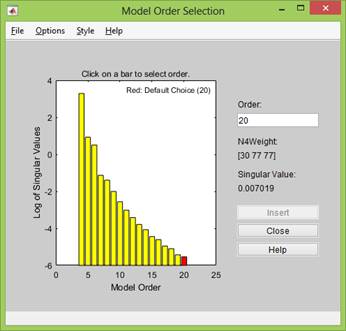
Рисунок 19 – Выбор порядка модели
Наиболее подходящим порядком модели в данном случае является 20-й порядок
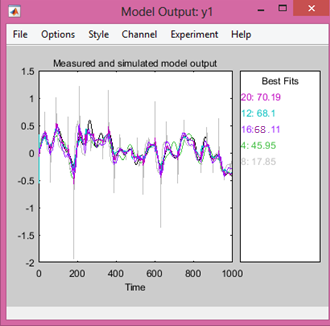
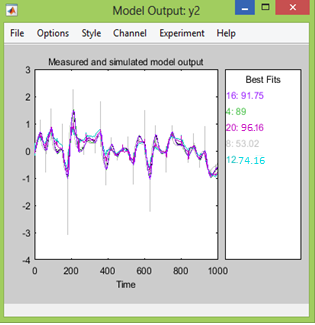
Рисунок 20 – Точность идентификации функции при 4,8,12,16,20 порядке
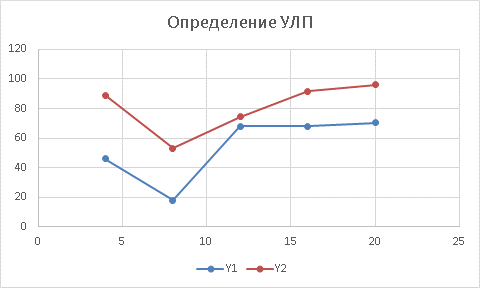
Рисунок 21 – точности идентификации по обоим каналам
Идентификация параметров модели неизвестной структуры функциями и N4SID в пространстве состояний: выбираем структуру, для этого на примере базового динамического ряда исследуем точность идентификации для порядков модели , уточнение точности вблизи наилучшего порядка 6,7,8,9,10 - для подтверждения уточненного лучшего порядка
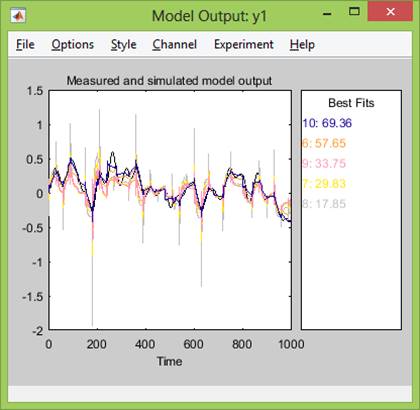
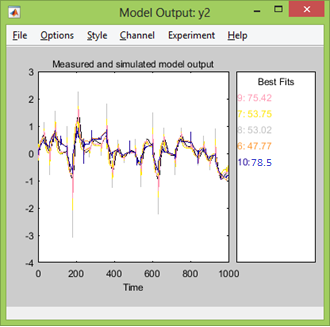
Рисунок 22 – уточнение УЛП
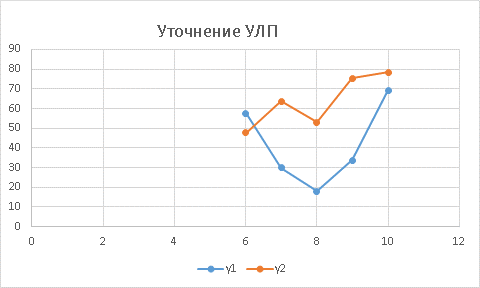
Рисунок 23 – график точностей для 6,7,8,9,10 порядков по обоим каналам
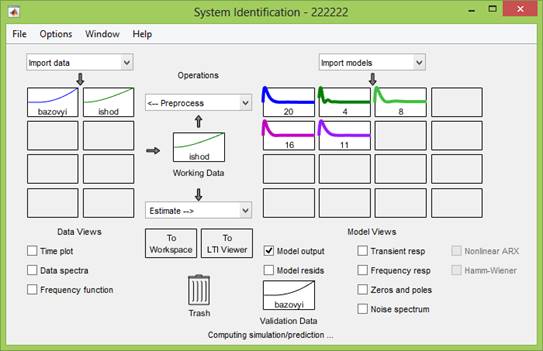
Рисунок 21 – Окно System Identification
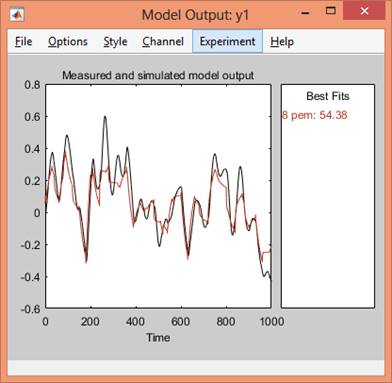
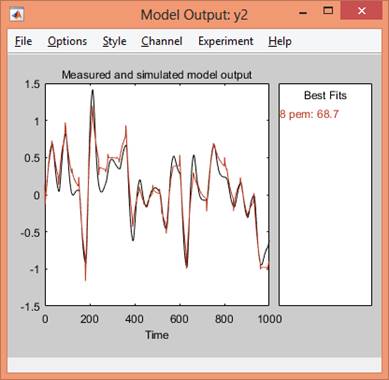
Рисунок 23 – Идентификация для УЛП с помощью функции PEM
Таблица 1 -Результаты идентификации
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.