4. Если А = ап, то δА = п·δа.
5.
Если т = 1, то ![]() .
.
Использование вышеприведенных правил 1-5 позволяет получить не слишком завышенную оценку предельной погрешности результата нелинейного косвенного измерения при т < 5. Для большого числа измерений рассмотрим методику обработки результатов многократных измерений ниже.
5.3. Обработка результатов многократных измерений
Особенность многократных измерений заключается в том, что наряду с нахождением измеренного значения Rизм необходимо определять предельно допустимую (допускаемую) абсолютную погрешность Δ как случайную величину, подчиняющуюся нормальному закону, с обязательным указанием значения доверительной вероятности Рд
R= Rизм ± Δ при Р = Рд
При небольшом числе многократных наблюдений (менее 60), имеющих нормальный закон распределения плотности вероятности, что наиболее характерно и типично в метрологии, измеренное значение Rизм определяется как среднее арифметическое значение результата измерений, предельно допустимая абсолютная погрешность находится по формуле Стьюдента
![]() ,
,
где t – коэффициент Стьюдента, определяемый с помощью специальных таблиц, левым столбцом которых являются число наблюдений (не более 60), а верхняя строка каждой таблицы Стьюдента составлена из значений доверительных вероятностей от 0,7 до 0,99;
![]() -
-
- средне квадратичное отклонение наиболее вероятного значения измеренной физической величины;
 -
-
- среднеквадратичное отклонение числового ряда измеренных значений;
![]() -
-
- квадраты случайных отклонений;
 -
-
- наиболее вероятное значение измеряемой величины (математическое ожидание);
п < 60 - количество наблюдений многократно измеряемой физической величины.
В качестве проверки правильности вычислений можно использовать выражение
![]() .
.
Точность измерения δ оценивают как относительную погрешность
![]() .
.
С помощью формул можно определять как доверительный интервал Δ по заданной доверительной вероятности Рд , так и доверительную вероятность Рд по заданному доверительному интервалу Δ.
Тема 3. Измерительные генераторы
Лекция 6. Измерительные генераторы и синтезаторы частот
6.1. Классификация измерительных генераторов.
6.2. Генераторы гармонических колебаний.
6.3. Импульсные генераторы.
6.4. Синтезаторы частоты.
6.1. Классификация измерительных генераторов
Измерительный генератор или автогенератор является устройством, которое вырабатывает сигналы различной формы и частоты.
В зависимости от формы выходного сигнала различают генераторы гармонических (содержащих одну или несколько гармоник) и релаксационных (импульсных) колебаний, содержащих широкий спектр гармоник с соизмеримыми между собой амплитудами.
По частотному диапазону генераторы подразделяются:
- инфранизкочастотные 0,01… 20 Гц;
- низкочастотные или генераторы звукового диапазона 20 … 300000 Гц;
- генераторы высоких частот 0,3 … 300 МГц;
- сверхвысокочастотные (СВЧ) свыше 300 МГц.
По функциональному назначению измерительные генераторы разделяются на:
- генераторы случайных колебаний (шумовые генераторы);
- генераторы гармонических колебаний;
- импульсные (релаксационные) генераторы, в том числе генераторы линейно-изменяющегося напряжения в качестве генераторов разверток.
В зависимости от стабильности частоты и формы выходного сигнала генераторы делятся на:
- генераторы сигналов (маркируются ГЗ);
- генераторы стандартных сигналов (маркируются Г4).
Кроме того, генераторы классифицируются по принципу действия, схемотехническому выполнению и др.
Все измерительные генераторы, кроме параметрических, состоят из нелинейного усилителя, цепи положительной обратной связи и источника питания.
6.2. Генераторы гармонических колебаний
Структурные схемы генератора сигналов (ГЗ) и генератора стандартных (маломощных) сигналов (Г4) представлены на рис. 6.1 и рис. 6.2 соответственно.
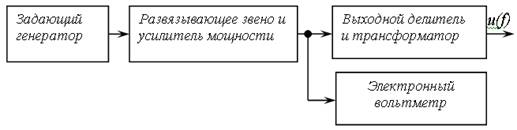
Рис. 6.1 Структурная схема генератора сигналов
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.