Примечания..В табл. 1 принято: τ с -
относительное время первого согласования, τ max
и τ
min - относительные времена достижения первых максимума и
минимума переходной функцией; τ5,
τ2,
τ1 -относительные времена
переходного процесса при 5%,
2% и 1% "трубках
точности"; σ max и σ min перерегулирование в % и ![]() минимум переходной
функции. Реальное значение времени t определяется
по формуле t = t /w0, где w0параметр типовой л.а. х. L (w ) вида
2 - 1 - 2. Добротность САУ по ускорению
минимум переходной
функции. Реальное значение времени t определяется
по формуле t = t /w0, где w0параметр типовой л.а. х. L (w ) вида
2 - 1 - 2. Добротность САУ по ускорению ![]() (1*с-2).
(1*с-2).
9. 4. Особенности построение разрешенных и запретных зон для ДСАУ
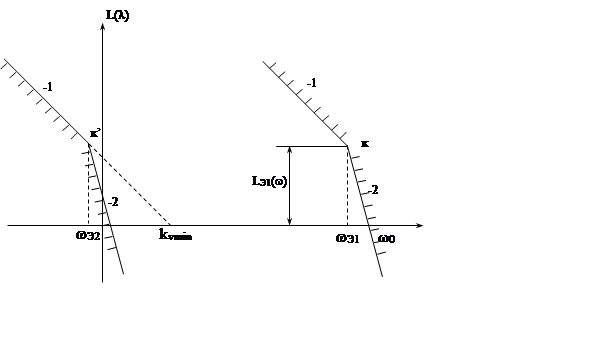
Рис. 10.12
Приступая к синтезу САУ модифицированным методом
Бесекерского, мы, в первую очередь, строим верхнюю границу разрешенной зоны для
расположения LЭ(λ)=LЖ (ω) по заданным
характеристикам объекта:![]() ,
, ![]() . Для оценки
. Для оценки ![]() используем сведения об
электродвигателе, классе его подшипников, максимально допустимых напряжениях и
частотах питания и т. п. сведеия. Для оценки
используем сведения об
электродвигателе, классе его подшипников, максимально допустимых напряжениях и
частотах питания и т. п. сведеия. Для оценки ![]() используем единственное
"уравнение динамики" двигателя (привода).
используем единственное
"уравнение динамики" двигателя (привода).
![]() ,
,
При этом считаем ![]() - максимальный момент
двигателя и
- максимальный момент
двигателя и
![]() момент
нагрузки ("холостой ход").
момент
нагрузки ("холостой ход").
Разрешенная зона строится в среднечастотной области. Поэтому предложения В. А. Бесекерского (3.12), справедливые для построения эапретной зоны по точности, здесь не приемлемы.
Воспользуемся другими достоверными условиями. Например, прямая, проходящая через точку к
(рис. 10. 12) с наклоном -20 дБ /дек, соответствует интегратору с ПФ ![]() где kv=
где kv=![]() =const.
Прямая же, проходящая через ту же точку с наклоном -40 дБ /дек, соответствует двойному интегратору с ПФ
=const.
Прямая же, проходящая через ту же точку с наклоном -40 дБ /дек, соответствует двойному интегратору с ПФ ![]() где добротность по
ускорению kа=
где добротность по
ускорению kа=![]() =const.
Нетрудно найти пересечение этих прямых в точке к и вычислить её
параметры
=const.
Нетрудно найти пересечение этих прямых в точке к и вычислить её
параметры
 и
и ![]() (3.
12)
(3.
12)
Следующим шагом, строим запретную зону по точности - нижнюю границу разрешенной зоны для расположения LЭ(λ)=LЖ (ω) ( см. рис. 11. 12).
Для получения максимального быстродействия в САУ
стремятся абсциссу (Т3)-1 "сдвинуть" правее. Но
длина отрезка ![]() определяет местоположения
точки (Т2)-1на оси абсцисс и низкочастотного участка LЖ(ω)
с наклоном -2, следовательно, и допустимую область расположения запретной
зоны по точности. При этих ограничениях желательно выбрать точку "к1"
(рис. 10. 12) с той же ординатой, что и точка "к". Это
упростит последующие расчеты.
определяет местоположения
точки (Т2)-1на оси абсцисс и низкочастотного участка LЖ(ω)
с наклоном -2, следовательно, и допустимую область расположения запретной
зоны по точности. При этих ограничениях желательно выбрать точку "к1"
(рис. 10. 12) с той же ординатой, что и точка "к". Это
упростит последующие расчеты.
Запретная зона по точности характеризует предельный
гармонический сигнал, который будет воспроизводиться синтезированной системой:![]() .
Первая и вторая производные этого сигнала будут такими:
.
Первая и вторая производные этого сигнала будут такими: ![]() ,
,![]() . Из этих уравнений
определим максимальные значения производных:
. Из этих уравнений
определим максимальные значения производных: ![]() ,
,![]() . Из последних равенств легко найти
. Из последних равенств легко найти
![]() ,
,![]()
![]() (4. 12)
(4. 12)
![]() -максимальная ошибка в установившемся режиме (в
радианах!!!)
-максимальная ошибка в установившемся режиме (в
радианах!!!)
Московскими учеными [2] было предложено определять Lk1(wЭ2) для ДСАУ с учетом погрешности, которую может внести квантование сигнала. Приведем их формулы без доказательств.
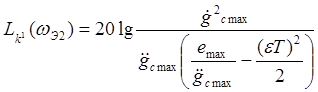 .
(5. 12)
.
(5. 12)
Наибольшая ошибка вносится при смещении ε=0,5. Тогда формула (5. 12) приобретет такой вид:
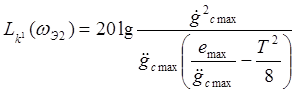 .
(6. 12)
.
(6. 12)
Итак,
запретную зону по точности проще построить, зная ординату Lk1(ωЭ2 ) и
наклоны её границ (-1) и (-2), чем вычислять сигнал g c max.
Тогда надо задаваться величиной emax
или ![]() .
.
![]()
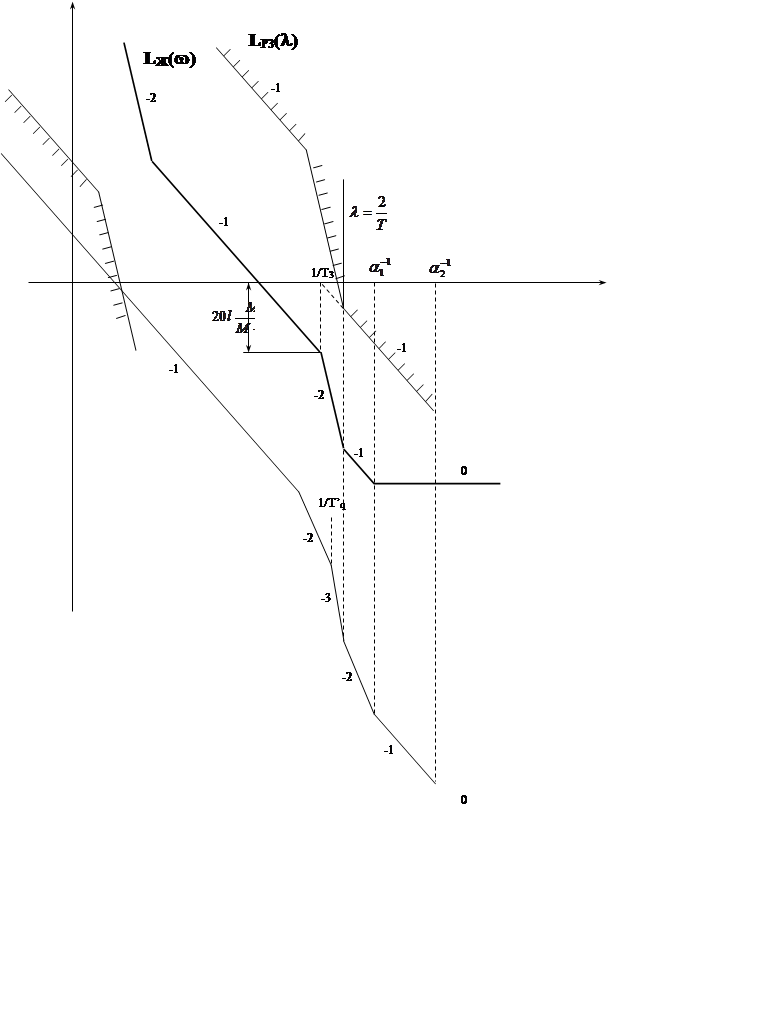
Рис. 11. 12.
Таблица 2
Показатели качества цифровых автоматических систем
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.