Все "основоположники" теории дискретных систем управления в (50 - 60) - е годы XX века считали необходимым сослаться на эту теорему, как на фактор, подтверждающий целесообразность получения спектра дискретного сигнала вида рис 3. 3. Поэтому у инженеров - практиков уже в течение полувека бытует ложное мнение о легкости выбора частоты квантования ωК (или Тк) из условия: ωК > ωС. Впервые существенно усомнился в этом (по мнению автора лекций) В. Гусев[13]. Мы уже обсудили ошибочность такого мнения (см. лк.3.) Так что же такое ряд (4. 4.)? Выше изложено личное мнение об этом автора(С. К.)
*) Это была одна из пяти (пятая) теорем, изложенных В. А. Котельниковым в работе" О пропускной способности эфира и проволоки в электросвязи". Подробнее см. [3].
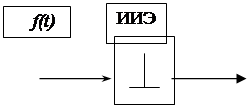
Следовательно "ряд Котельникова - Шеннона" (4.4.) представляет собою математическую модель непрерывной функции времени, квантованную идеальным импульсным элементом и восстановленную экстраполятором Э0. (См. рис.3.4.). Какой либо другой полезной информации по сравнения с фундаментальной формулой (11.1) выражение (4. 4) не несет. Таким образом, указанная теорема реально не дает каких - либо оснований для выбора частоты квантования в ДСАУ.
 |
|||
|
||||
|
 |
Т
Рис.3.4.
ГЛАВА 2. Дискретные преобразования
2.1. Введение
Дискретные функции часто удобнее подвергнуть преобразованию с тем, чтобы расчеты и моделирование проводить в области изображений, а не в области временных функций.
Для линейных непрерывных систем достаточно владеть одним только преобразованием Лапласа, однако для исследования моделей дискретных систем и решения разностных уравнений следует иметь представление о 3-х преобразованиях и уметь пользоваться хотя бы двумя из них.
2.2. Дискретное преобразование Лапласа
Отметим сначала, что этот термин введен, безусловно, не самим Лапласом (чьи труды относятся к началу 19 века), а учеными более поздних времен при разработке дискретных систем в середине 20 века. Это: Цыпкин Я.и др. (СССР)[3], Баркер Р. Х., Гуревич В.,Шеннон К. и др. (США).
Определение.
![]() .
(8.4.)
.
(8.4.)
Сравним (8.4) с формулой непрерывного преобразования
Лапласа:  .
.
Здесь аргумент q является безразмерной
величиной (точнее, имеет размерность угла в радианах). Отсюда появляется еще
одно замечание. Рассмотрим q в виде комплексного числа в алгебраической форме: ![]() . Очевидно, σ, и
. Очевидно, σ, и ![]() имеют также размерность
радиан. К решетчатой функции f[n,0]
предъявляются такие же требования,
как и к f(t). Она должна быть ограниченного роста, "слева
"от нуля тождественно равна нулю.
имеют также размерность
радиан. К решетчатой функции f[n,0]
предъявляются такие же требования,
как и к f(t). Она должна быть ограниченного роста, "слева
"от нуля тождественно равна нулю.
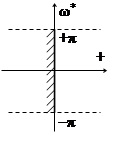
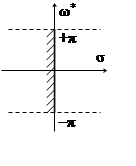 Поскольку
угол изменяется с периодом 2π, то нас будет интересовать не только
"основная полоса" плоскости q,
отвечающая значениям Im(q)=
Поскольку
угол изменяется с периодом 2π, то нас будет интересовать не только
"основная полоса" плоскости q,
отвечающая значениям Im(q)= ![]() в
пределах от–π - 0 до +π и все боковые полосы,
от+π до +3π
и т.д., а также от –π до –3π и т. д.т. Точнее, все "левые"
полу σ полосы простирающиеся от мнимой оси.
Обратим внимание на штриховку слева, – она обозначает область, в которой должны
располагаться корни устойчивой системы. Причем весь
комплект Рис.4.4.
в
пределах от–π - 0 до +π и все боковые полосы,
от+π до +3π
и т.д., а также от –π до –3π и т. д.т. Точнее, все "левые"
полу σ полосы простирающиеся от мнимой оси.
Обратим внимание на штриховку слева, – она обозначает область, в которой должны
располагаться корни устойчивой системы. Причем весь
комплект Рис.4.4.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.