Коэффициент при S в
знаменателе передаточной функции регулятора представляет собой постоянную
интегрирования и в простейшем случае равен ![]() .
При выводе этой зависимости ранее предполагалось, что все малые постоянные
времени представляют собой малые инерционности, сосредоточенные в прямом
канале. Между тем, на практике малые постоянные встречаются как в прямом
канале, так и в канале обратной связи.
.
При выводе этой зависимости ранее предполагалось, что все малые постоянные
времени представляют собой малые инерционности, сосредоточенные в прямом
канале. Между тем, на практике малые постоянные встречаются как в прямом
канале, так и в канале обратной связи.
Рис. 9
![]()
Для определения величины В0 при наиболее общей структуре контура регулирования служит формула Д.С.Ямпольского (Ямпольский С.Д. Электричество, №6, 1969, стр.24-29)
:
 .
.![]()
Физический смысл имеет только ![]() Рассмотрим
несколько распространенных на практике случаев.
Рассмотрим
несколько распространенных на практике случаев.
1. Малые
постоянные есть только в прямом канале регулирования, малые упреждения
отсутствуют, т.е. ![]() ;
;
![]() тогда
тогда
![]() .
.
2. Малые
инерционности есть как в прямом канале, так и в канале обратной связи; малые
упреждения отсутствуют, т.е. ![]()
![]() ;
;
![]() ,
тогда
,
тогда
![]() .
.
Эта формула важна, т.к. рассмотренный случай является наиболее распространенным на практике, что обусловлено инерционностью большинства применяемых датчиков и необходимостью установки фильтров в цепи обратной связи (например, для фильтрации напряжения тахогенератора).
3. Малые инерционности имеются только в прямом канале,
малые упреждения имеются только в канале обратной связи, т.е. ![]() В
этом случае
В
этом случае
![]() .
.
При ![]() подкоренное
выражение отрицательно, что лишает В0 физического смысла. Это
означает, что при таком соотношении параметров оптимизируемого контура
модульный оптимум не достигается. Следует отметить, что в этом случае
существует возможность повышения быстродействия контура за счет увеличения
коэффициента регулятора без появления перерегулирования.
подкоренное
выражение отрицательно, что лишает В0 физического смысла. Это
означает, что при таком соотношении параметров оптимизируемого контура
модульный оптимум не достигается. Следует отметить, что в этом случае
существует возможность повышения быстродействия контура за счет увеличения
коэффициента регулятора без появления перерегулирования.
В тех случаях, когда требуется повысить усиление регулятора по сравнению с усилением, соответствующем настройке по модульному оптимуму, целесообразно вводить в канал обратной связи форсирующие звенья, создающие необходимое упреждение. Однако, при этом необходимо учитывать возможность снижения помехоустойчивости системы.
Если в третьем случае соотношение параметров
таково, что ![]() ,
то существуют два значения В0, из которых для расчета настройки
регулятора следует выбирать большее. Полученное таким образом значение В0 используется
для определения оптимальных параметров регулятора.
,
то существуют два значения В0, из которых для расчета настройки
регулятора следует выбирать большее. Полученное таким образом значение В0 используется
для определения оптимальных параметров регулятора.
Передаточная функция замкнутого оптимизированного контура определяется формулой
 ,
где
,
где ![]() .
.
 При рассмотрении наиболее общей структуры контура
регулирования не учитывалась возможность нахождения в составе объекта малого
колебательного звена с передаточной функцией вида
При рассмотрении наиболее общей структуры контура
регулирования не учитывалась возможность нахождения в составе объекта малого
колебательного звена с передаточной функцией вида ![]() ,
некомпенсированного действием регулятора. Такой случай наблюдается при
настройке контура, в состав которого входит замкнутый подчиненный контур. В
большинстве случаев "малое колебательное звено" можно с достаточной
точностью можно заменить инерционным звеном с передаточной функцией
,
некомпенсированного действием регулятора. Такой случай наблюдается при
настройке контура, в состав которого входит замкнутый подчиненный контур. В
большинстве случаев "малое колебательное звено" можно с достаточной
точностью можно заменить инерционным звеном с передаточной функцией ![]() .
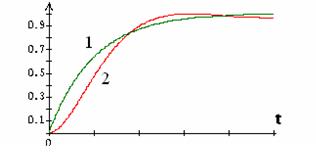
Такое предположение основывается на "близости" переходных
характеристик указанных звеньев
.
Такое предположение основывается на "близости" переходных
характеристик указанных звеньев
Рис.10 Переходные характеристики инерционного звена -1 и звена второго порядка –2.
При отсутствии в составе объекта других звеньев с малыми постоянными времени замена звена второго порядка инерционным звеном приводит к отклонению переходного процесса оптимизируемого контура от стандартного:
при ![]() настройка
контура очень мало отличается от оптимальной настройки. При
настройка
контура очень мало отличается от оптимальной настройки. При ![]() заметно
возрастает перерегулирование. Для
заметно
возрастает перерегулирование. Для ![]() ,
т.е. при наличии в составе объекта замкнутого оптимизированного по
модульному оптимуму контура, перерегулирование составляет 8%. Если такая
величина приемлема, то можно принять
,
т.е. при наличии в составе объекта замкнутого оптимизированного по
модульному оптимуму контура, перерегулирование составляет 8%. Если такая
величина приемлема, то можно принять ![]() .
При наличии других малых постоянных времени величина перерегулирования будет
находиться в пределах 4-8%, что приемлемо для большинства практических случаев.
Если же требуется стандартная величина перерегулирования 4,3%, то при
.
При наличии других малых постоянных времени величина перерегулирования будет
находиться в пределах 4-8%, что приемлемо для большинства практических случаев.
Если же требуется стандартная величина перерегулирования 4,3%, то при ![]() величину
T3i
принимают равной
величину
T3i
принимают равной ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.