


Санкт-Петербургский государственный политехнический университет
Факультет технической кибернетики
—————————
Кафедра систем автоматического управления
ОТЧЕТ
по лабораторной работе №7
«Управление тележкой»
Студент : Ву Ван
Группа: 3083/2
Преподаватель: Н.
Санкт-Петербург 2011
Создать программу по управлению тележкой. Использовать язык LD для написания программы
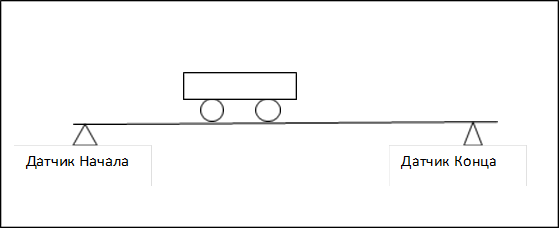 |
Пусть у нас тележка движится в отрезке, длина которого задана. В начале и конце отрезка стоят 2 датчика, которые проверяют тележка достигает ли начала или конца отрезка соответственно. Пользователь может выбрать какое направление (назад или вперед) для тележки, так же может поставить ее в начало отрезка или в какое заданное место в отрезке. Если тележка достигал начала или конца отрезок, но ничего не появлялось в датчиках то дается пользователю сигнал ошибки системы.
Для создания скорости движения тележки воспользуемся блоком таймера, на вход которого подадим инверсию его выхода, чтобы определить время, за которое тележка сдвигает шаг за шагом. Будем считать таковые импульсы, генеруемые таймером, с помощью счетчика UP/DOWN (UP/DOWN COUNTER) .При включении одного из датчиков тележка остановиться. Если тележка движется в одну сторону, то нельзя сразу переключить её направление. Нужно предварительно остановить тележку.
Конфигурация
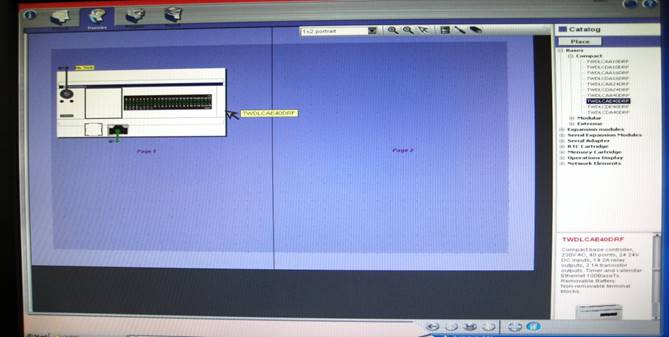
1)Выбрем контроллер TWDLCAE40DRF из категория Compact:
2) Определяем адрессы переменных дискретного управления:
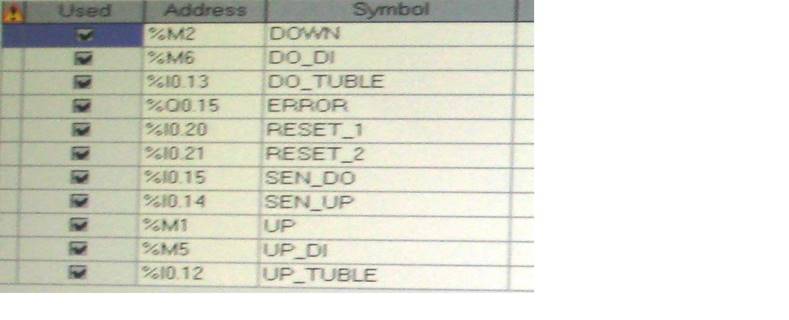
В программе используются:
%I0.12: Тумблер выбора направления «ВПЕРЁД»
%М5: Выбор направления «ВПЕРЁД»
%М1: Таковой импульс направления «ВПЕРЁД»
%I0.13: Тумблер выбора направления «НАЗАД»
%M6: Выбор направления «НАЗАД»
%M2: Таковой импульс направления «НАЗАД»
%I0.14: Датчик конца
%I0.15: Датчик начала
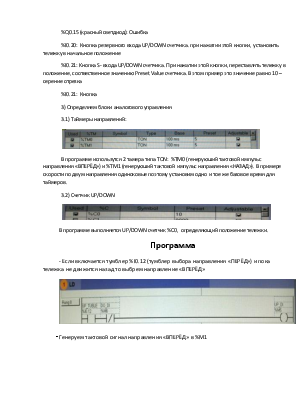
%Q0.15 (красный светдиод): Ошибка
%I0.20: Кнопка резервного входа UP/DOWN счетчика. при нажатии этой кнопки, установить тележку в начальное положение
%I0.21: Kнопка S- входа UP/DOWN счетчика. При нажатии этой кнопки, переставлять тележку в положение, соотвественное значению Preset Value счетчика. В этом пример это значение равно 10 – серение отрезка
%I0.21: Кнопка
3) Определяем блоки аналогового управления
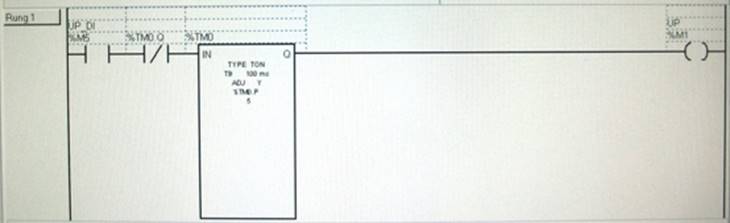
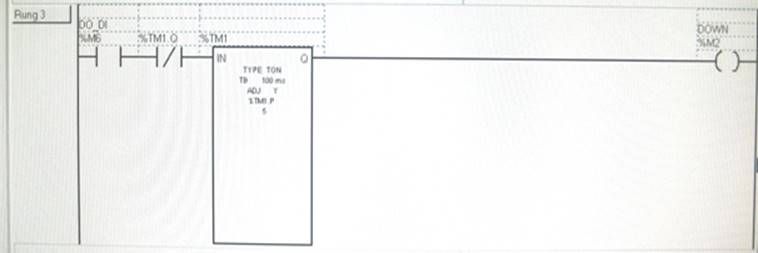
3.1) Таймеры направлений:

В программе использутся 2 тамера типа TON: %TM0 (генеруюший тактовой импульс направления «ВПЕРЁД») и %TM1 (генеруюший тактовой импульс направления «НАЗАД»). В примере скорости по двум направления одиноковые поэтому установим одно и тое же базовое время для таймеров.
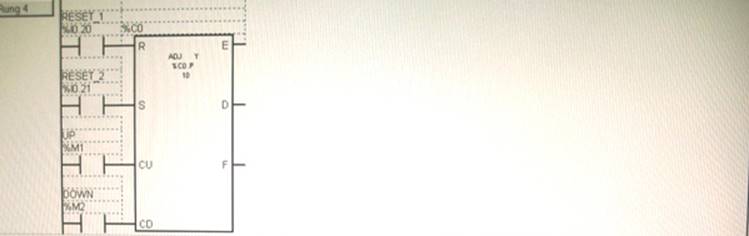
3.2) Счетчик UP/DOWN
![]()
В программе выполняется UP/DOWN счетчик %C0, определяющий положение тележки.
Программа
- Если включается тумблер %I0.12 (тумблер выбора направления «ПЕРЁД») и пока тележка не движится назад то выбрем направление «ВПЕРЁД»

-Генеруем тактовой сигнал направления «ВПЕРЁД» в %М1
- Если включается тумблер %I0.13(тумблер выбора направления «НАЗАД») и пока тележка не движится вперёд то выбрем направление «НАЗАД»

-Генеруем тактовой сигнал направления «НАЗАД» в %М2
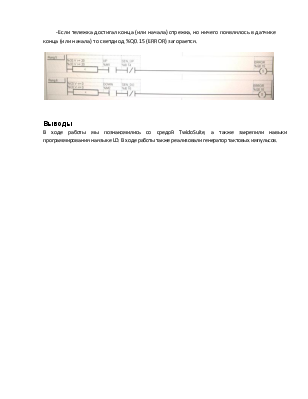
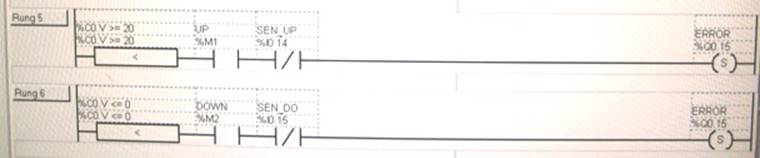
-Управление тележкой, определение ее положения с помощью счетчика UP/DOWN %C0
-Если тележка достигал конца (или начала) отрежка, но ничего появлялось в датчике конца (или начала) то светдиод %Q0.15 (ERROR) загорается.
В ходе работы мы познакомились со средой TwidoSuite, а также закрепили навыки программирования на языке LD. В ходе работы также реализовали генератор тактовых импульсов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.