Расчетные схемы механической части электропривода
Расчетные схемы механической части электропривода
-
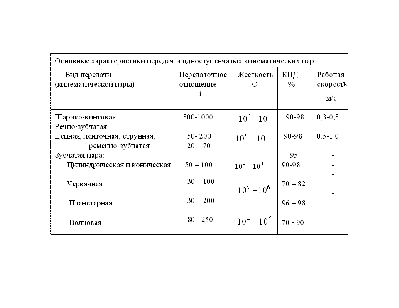
Массы элементов и жесткости элементарных связей в кинематической цепи привода различны. Определяющее влияние на движение системы оказывают наибольшие массы и наименьшие жесткости связей. Поэтому одной из первых задач проектирования и исследования электроприводов является составление упрощенных расчетных схем механической части, учитывающих возможность пренебрежения упругостью достаточно жестких механических связей и приближенного учета влияния малых движущихся масс. При этом следует учитывать, что в связи с наличием передач различные элементы системы движутся с разными скоростями, поэтому непосредственно сопоставлять их моменты инерции , массы , жесткости связей и , деформации и , перемещения и и т.п. невозможно.
-
Для составления расчетных схем механической части электропривода необходимо приведение всех параметров элементов кинематической цепи к одной расчетной скорости.
Расчетные схемы механической части электропривода
Условием соответствия приведенной расчетной схемы реальной механической системе является выполнение закона сохранения энергии.
При приведении необходимо обеспечить сохранение запаса кинетической и потенциальной энергии системы, а также элементарной работы всех действующих в системе сил и моментов на возможных перемещениях.


Расчетные схемы механической части электропривода
При приведении вращательных и поступательных перемещений необходимо учитывать, что передаточное число и радиус приведения определяются соотношением скоростей. Исходя из этого, в общем случае перемещения в системе связаны так:
При линейных кинематических связях
и формулы приведения перемещений имеют вид
Расчетные схемы механической части электропривода
-
При приведении жесткостей механических связей должно выполняться условие равенства запаса потенциальной энергии деформации упругих элементов.
-
Откуда получим формулы приведения


Расчетные схемы механической части электропривода
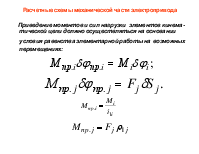
Приведение моментов и сил нагрузки элементов кинема -тической цепи должно осуществляться на основании условия равенства элементарной работы на возможных перемещениях:


-
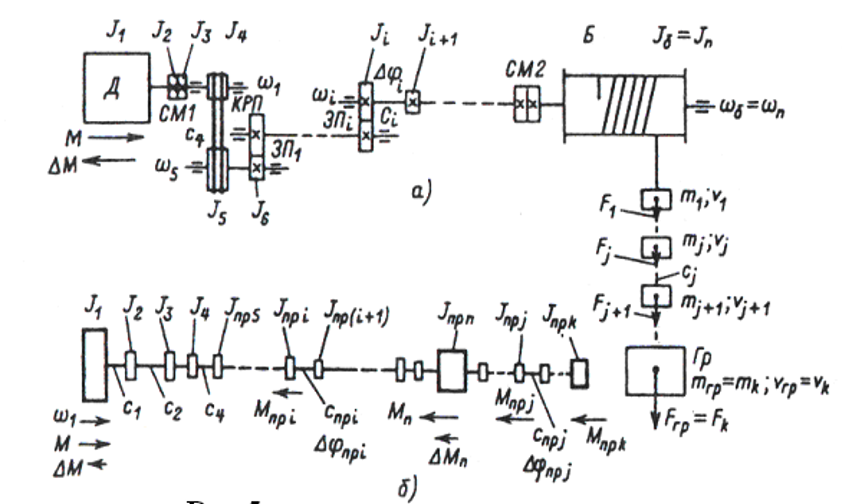
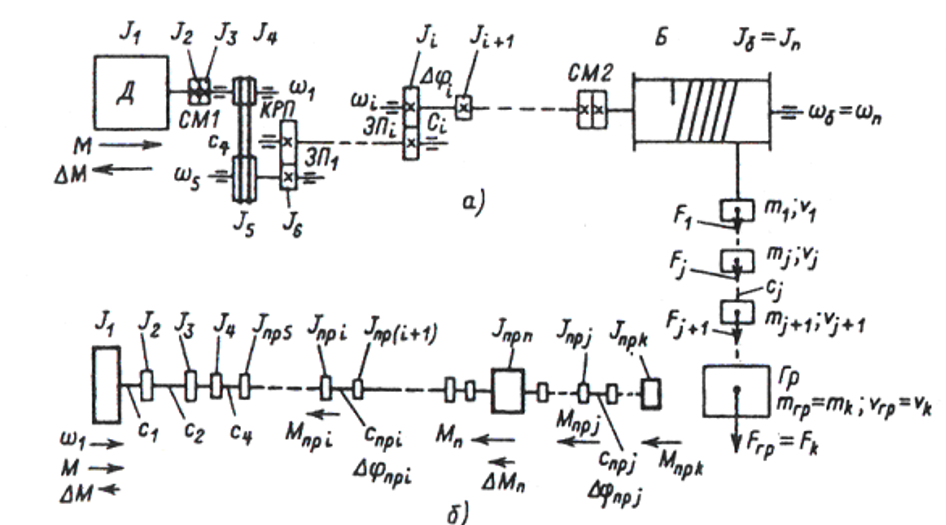
После приведения всех величин к расчетной скорости представляется возможным, сопоставив приведенные значения моментов инерции и жесткостей, осуществить выбор главных масс и главных упругих связей и на этой основе составить приближенную расчетную схему механической части.
-
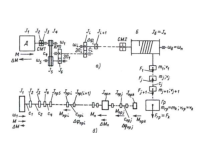
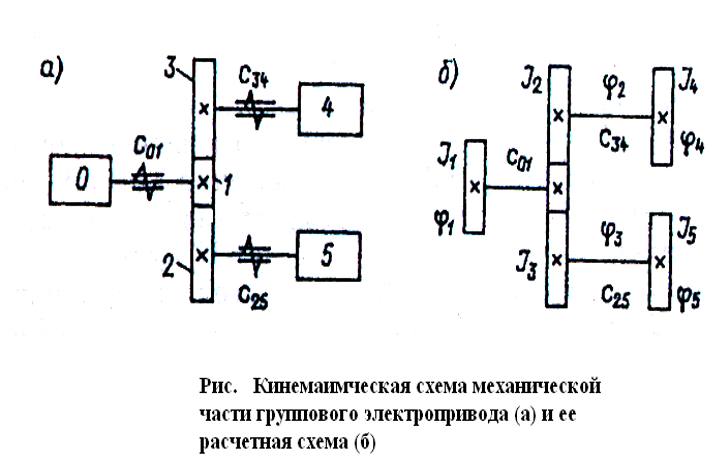
Для примера в полученной схеме выделены три наиболее значительные массы :
-
ротор двигателя с моментом инерции J1,
-
барабан с приведенным моментом инерции Jпр.n
-
груз Jпр.к.
-
Рассматривая эту схему, можно видеть, что вследствие малости остальных моментов инерции ее можно существенно упростить.
-
Для этого следует малые массы добавить к близлежащим большим, а затем определить эквивалентные жесткости связей между полученными массами по общей формуле
Расчетные схемы механической части электропривода
Расчетные схемы механической части электропривода
-
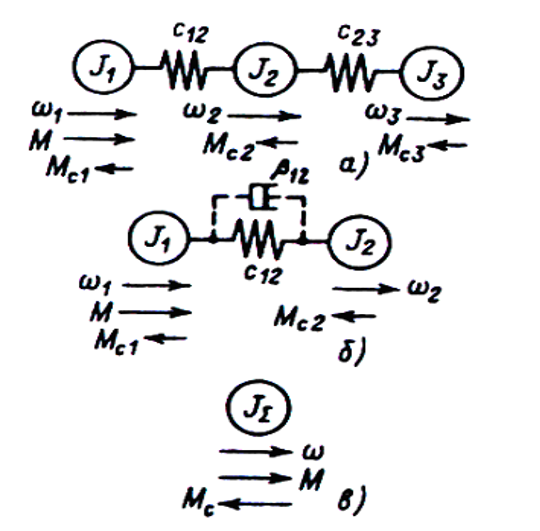
В большинстве практических случаев в результате выделения главных масс и жесткостей сводятся к трехмассовой , двухмассовой расчетным схемам и к жесткому приведенному механическому звену.
-
Параметрами обобщенной трехмассовой упругой механической системы (расчетной схемы) являются
-
суммарные приведенные моменты инерции , , ,
-
связи между которыми приняты жесткими,
-
и
-
эквивалентные приведенные жесткости механических упругих связей между ними.



В обобщенной двухмассовой упругой системе суммарный приведенный момент инерции элементов, жестко связанных с двигателем, аналогично предыдущему обозначен .
Суммарный приведенный момент инерции элементов, жестко связанных с рабочим органом механизма, обозначен .
Безынерционная упругая связь между этими массами характеризуется приведенной эквивалентной жесткостью .



-
Когда параметры системы таковы, что влияние упругих связей незначительно, или при решении задач, в которых с этим влиянием можно не считаться, механическая часть представляется простейшей расчетной схемой, не учитывающей влияния упругих связей, т.е.
-
жестким приведенным звеном .
-
Все инерционности заменяются одной эквивалентной массой с моментом инерции
-
, на которую воздействуют электромагнитный момент двигателя М и суммарный приведенный к валу двигателя момент нагрузки .�Момент нагрузки включает в себя все внешние силы, приложенные к механической системе, кроме момента двигателя М.


-
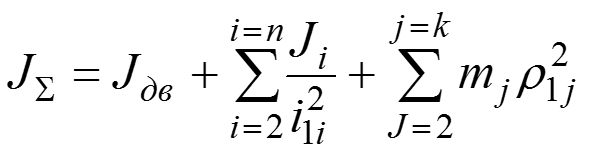
При приведении к валу двигателя суммарный приведенный момент инерции электропривода может быть выражен общей формулой
-
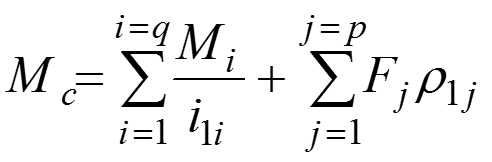
Суммарный приведенный к валу двигателя момент статической нагрузки можно в общем виде записать так
35
-
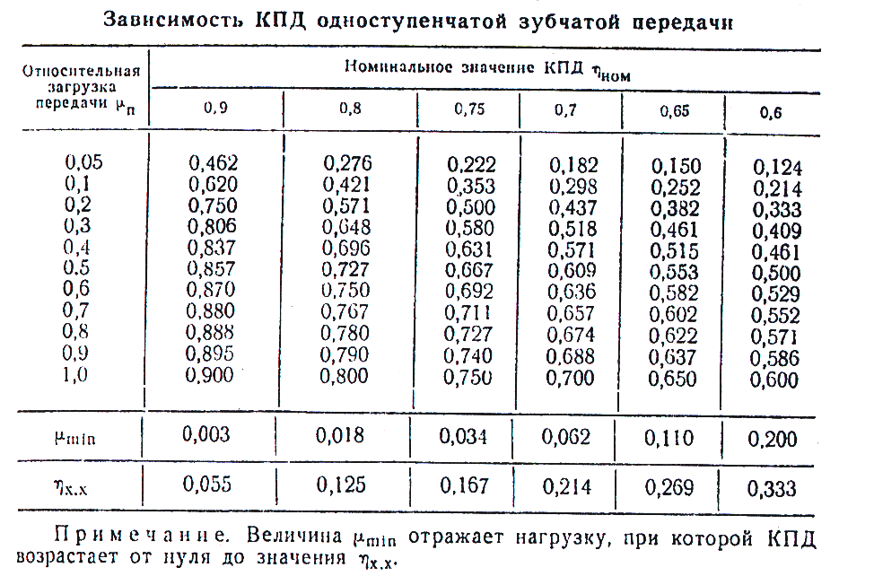
Учет потерь в механической части привода


-
Самоторможение механических передач


-
Самоторможение механических передач


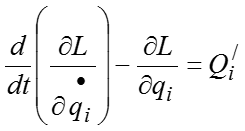
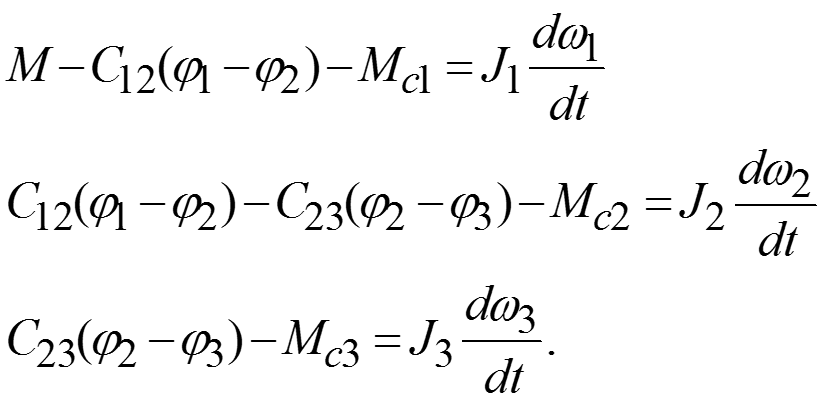
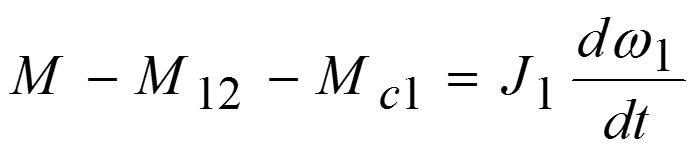
Уравнения движения электропривода
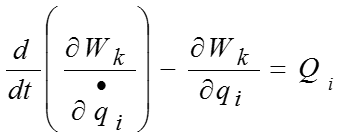




-
Рассматривая эти уравнения, можно установить, что уравнения движения приведенных масс электропривода однотипны. Они отражают физический закон (второй закон Ньютона), в соответствии с которым ускорение твердого тела пропорционально сумме всех приложенных к нему моментов (или сил), включая моменты и силы, обусловленные упругим взаимодействием с другими твердыми телами системы.
-
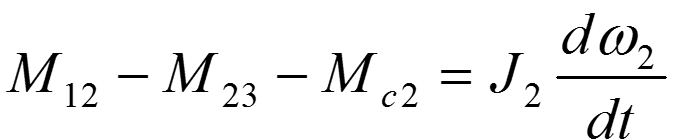
Уравнения движения двухмассовой системы могут быть получены