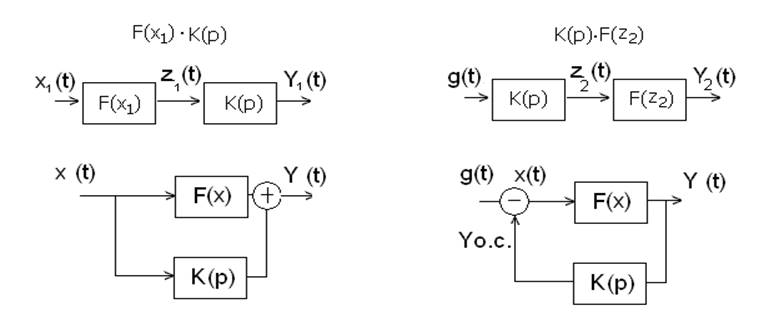
На рис. изображено четыре варианта соединения линейных и нелинейных звеньев, естественно, их может быть больше.
1). Схема с последовательным включением нелинейного
элемента и ЛЧ неразрешима, если полученная на выходе нелинейности функция ![]() нелинейная и не может быть
заменена эквивалентным линейным функционалом.
нелинейная и не может быть
заменена эквивалентным линейным функционалом.
2). Схема с последовательным включением ЛЧ и
нелинейностью легко разрешима, так как полученная на выходе ЛЧ линейная функция
![]() подвергается лишь нелинейному
безинерционному масштабированию элементом F(z2).
подвергается лишь нелинейному
безинерционному масштабированию элементом F(z2).
3) Схема с параллельным соединением линейного и нелинейного элементов не вызывает проблем, так как выходная величина ЛЧ складывается с сигналом безинерционного НЭ.
Подобные правила можно применить и для анализа других разомкнутыхсистем. Сложнее аналитически исследовать замкнутые системы.
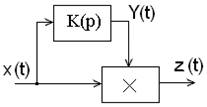
4). Схема с отрицательной обратной связью.
Пусть F(x) будет статическая, гладкая, нечетно-симметричная
зависимость, а обратная связь реализуется безинерционным линейным звеном с коэффициентом
передачи k (К(р)= k). Поэтому уравнение ![]() алгебраическое (не дифференциальное!).
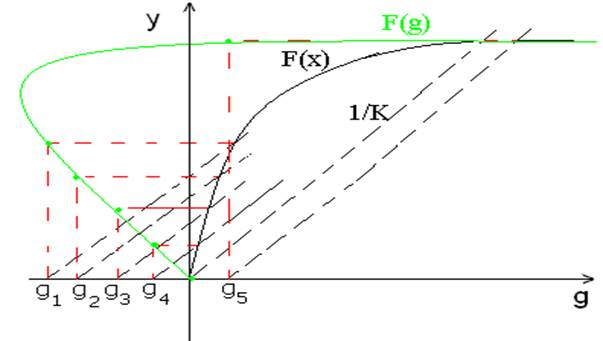
Если сигнал g известен, то можно получить зависимость F(g).
алгебраическое (не дифференциальное!).
Если сигнал g известен, то можно получить зависимость F(g).
Задача может быть решена графо-аналитическим способом.
Сначала равенство ![]() записывается в виде g=x+yoc,
где
записывается в виде g=x+yoc,
где ![]() . Тогда, задавая последовательно
ряд значений xi и, решая
графически уравнение
g=x+yoc, получим искомую нелинейность F(g). ("Красная"
кривая на рис.).
. Тогда, задавая последовательно
ряд значений xi и, решая
графически уравнение
g=x+yoc, получим искомую нелинейность F(g). ("Красная"
кривая на рис.).
Вспомогательная прямая, как решение уравнения ![]() , построена во втором квадранте.
, построена во втором квадранте.
Опишем алгоритм решения задачи при x = x1 . На кривой F(x)=y при x = x1 получили значение F(x1) = y1 - (ближняя точка на кривой от начала координат). Из точки y1 провели прямую, характеризующую уравнение обратной связи, до оси абсцисс. Получили решение уравнения g=x+yoc в виде g1=x1+yoc1. По ординатам g1 и y1 нашли первую точку "красной" кривой F(g). Далее, принимая x2= g1, находим y2 и повторяем решение задачи.
Охват нелинейности отрицательной обратной связью всегда приводит к расширению зоны линейности её характеристики. Этим свойством линейной отрицательной обратной связи часто пользуются в реальных механизмах и устройствах для уменьшения влияния естественных нелинейностей их узлов и деталей на динамические и установившиеся режимы работы
4). Рассмотрим влияние охвата нелинейности
положительной обратной связью. Характеристика нелинейности F(x) та же, что и в предыдущем
примере, но теперь ![]() , а
, а ![]() Методика построения "зеленой"
кривой F(g) аналогична. Как следует из рисунка ниже, характеристика замкнутой системы F(g) стала более нелинейной и даже "статически
неустойчивой" на
участке изменения сигнала управления g от 0 до значения g4 , а при
значении сигнала g5 характеристика нелинейности F(g) входит в зону насыщения. Реально нелинейность
F(x) приобрела физические свойства "однополярного реле"
F(g).
Методика построения "зеленой"
кривой F(g) аналогична. Как следует из рисунка ниже, характеристика замкнутой системы F(g) стала более нелинейной и даже "статически
неустойчивой" на
участке изменения сигнала управления g от 0 до значения g4 , а при
значении сигнала g5 характеристика нелинейности F(g) входит в зону насыщения. Реально нелинейность
F(x) приобрела физические свойства "однополярного реле"
F(g).
Особые нелинейные звенья
Особыми нелинейными звеньями являются: умножители, делители, квадраторы, радикалы, тригонометрические функторы и другие…
(![]()
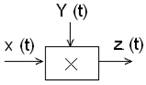
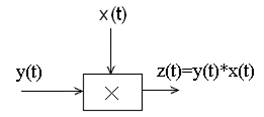
Рассмотрим пример работы с блоком умножения.
|
а).
Пусть x(t)=x0
=const. Перейдем
к линейным преобразованиям (Лапласа):  .
Если функция y(t) удовлетворяет условиям преобразования Лапласа (самое важное
из которых: y(t)=0 при
.
Если функция y(t) удовлетворяет условиям преобразования Лапласа (самое важное
из которых: y(t)=0 при ![]() ,
, ![]() - ограниченного роста при t
> 0). Следовательно, преобразование Лапласа для произведения
- ограниченного роста при t
> 0). Следовательно, преобразование Лапласа для произведения ![]() возможно,
иными словами нелинейное звено выродилось в линейное.
возможно,
иными словами нелинейное звено выродилось в линейное.
б) Если ![]() , а x(t) удовлетворяет условиям Лапласа,
то также нелинейного звена нет.
, а x(t) удовлетворяет условиям Лапласа,
то также нелинейного звена нет.
в) Если ![]() :
:
Получаем![]() - явно
нелинейный сигнал, то есть на выходе блока умножения имеет место нелинейная
функция z(t), определяющая динамику системы.
- явно
нелинейный сигнал, то есть на выходе блока умножения имеет место нелинейная
функция z(t), определяющая динамику системы.
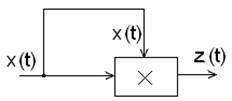
г) Если ![]() , тогда Z(t)=x2(t)
нелинейная квадратичная функция. Аналогично, произведение
, тогда Z(t)=x2(t)
нелинейная квадратичная функция. Аналогично, произведение ![]() также нелинейная функция.
также нелинейная функция.
Математические модели нелинейных звеньев
Нелинейные звенья звеньев с однозначными характеристиками могут быть описаны аналитическими зависимостями (в случае гладких нелинейностей). Для упрощения выражений рекомендуется использовать аппроксимацию. В том случае, если характеристика звена есть ломаная линия (кусочно-линейные звенья), то его математическая модель представляется арифметико-логической функций или кусочно-линейным оператором.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.