4. При исследовании НСАУ следует грамотно использоватьвозможности моделирования. Конечно, можно построить модель конкретной НСАУ и выполнить исследование ее процессов с помощью методов моделирования. Однако надо быть уверенным в том, что примененная модель действительно отражает реальный физический процесс в исследуемой системе (адекватность модели системе).
5. НСАУ по своим динамическим характеристикам часто оказываются более предпочтительными, чем ЛСАУ. Поэтому при построении реальных систем с хорошими качественными показателями часто вводят нелинейности, несмотря на то, что НСАУ значительно сложнее исследовать.
Пример. Линейная
САУ имеет безинерционный усилитель мощности с коэффициентом передачи ![]() и объект управления с
передаточной функцией
и объект управления с
передаточной функцией  .
.

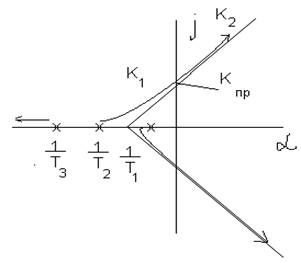
При исследовании системы методом корневого годографа можно определить критический коэффициент усиления kпр. Построим переходные характеристики ЛСАУ при коэффициентах передачи k1 < kпр и k2 > kпр.:
![]() ,
, ![]() .
.
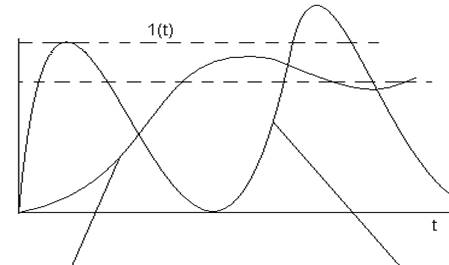
В случае а), когда k1 < kпр, система имеет статическую ошибку около 10% и долгий переходный процесс.
В случае б) установившаяся ошибка могла бы быть маленькой, но система неустойчива, зато процессы в такой системе протекают быстро.
Если
обеспечить нелинейность усилителя мощности с ![]() ,
то переходная характеристика этой НСАУ будет обладать малым временем переходного
процесса и малым перерегулированием.
,
то переходная характеристика этой НСАУ будет обладать малым временем переходного
процесса и малым перерегулированием.
Нелинейная САУ собрала все высокие показатели качества ЛСАУ (малую статическую ошибку - высокую точность и высокое быстородействие в динамическом режиме при малом перерегулировании), которые оказались в ЛСАУ нереализуемыми.
Разновидности структур и звеньев в НСАУ
Исходные положения
Структура НСАУ и ее звенья (их математическая модель) определяют динамику системы и ее качество. Чтобы понять сущность этих разновидностей, повторим запись модели НСАУ попробуем ее конкретизировать.
В представленной модели нелинейный элемент (НЭ) и линейная часть (ЛЧ) соединены последовательно.
Обобщенные структуры НСАУ
Наибольшее распространение получила следующая классификация (предложена Е.П. Поповым):
I. Структуры НСАУ первого класса
В такую структуру должен обязательно входить один нелинейный элемент (НЭ), как правило, включенный на входе разомкнутой САУ:

Примечание1.Такое включение НЭ задается условиями реальной САУ, то есть заданными системе свойствами обработки информации и преобразования энергии. В первом случае это будет искусственная нелинейность, вводимая в регулятор, а во втором случае естественная нелинейностькакого-либо элемента объекта управления (ОУ). Во втором случае нелинейность F(xi) окажется "внутри" ЛЧ. Но и тогда можно использовать структуру данного класса, заменив ЛЧ с нелинейностью приведенной линейной частью(ПЛЧ).

Здесь ![]() (оператор
дифференцирования) и ЛЧ - линейная часть. Напомним, что теперь для описания ЛЧ используется
функция временного пространства Ко(р), а не области
"изображений" Ко(s). Нелинейность может иметь различные
варианты:
(оператор
дифференцирования) и ЛЧ - линейная часть. Напомним, что теперь для описания ЛЧ используется
функция временного пространства Ко(р), а не области
"изображений" Ко(s). Нелинейность может иметь различные
варианты:
1. Нелинейность состоит из последовательной комбинации нелинейных звеньев.
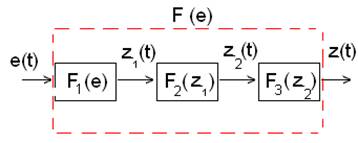
В этом случае математическая модель НСАУ будет иметь вид:
2. Нелинейность F(e) состоит из параллельного (согласного или встречного) соединения нелинейных звеньев. Возможно такое же соединение нелинейных и линейных звеньев.
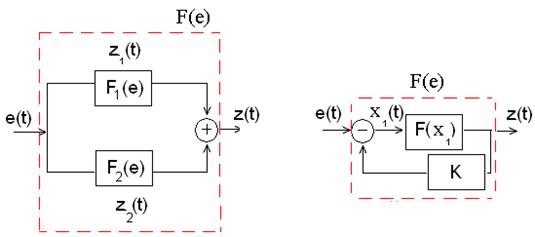
На последнем рисунке вместо К в обратной связи может быть и К(р).
3. В случае динамической нелинейности вместо F(e) записывают F(е, рe).
НСАУ первого класса всегда имеют одно нелинейное звено или комбинацию линейных или нелинейных звеньев и линейную часть системы, соединенную последовательно с нелинейной. Для обозначения нелинейной части системы используются однозначные аббревиатуры: НЭ - нелинейный элемент, НЧ - нелинейная часть.
2. Структуры НСАУ второго класса
Пусть динамическая нелинейность представлена зависимостью:
![]()
Переменные x1 и x2 связаны между
собой линейной зависимостью: ![]() .
.
Отсюда
 и
и ![]() .
.
С учетом полученных соотношений структура НСАУ будет иметь вид:
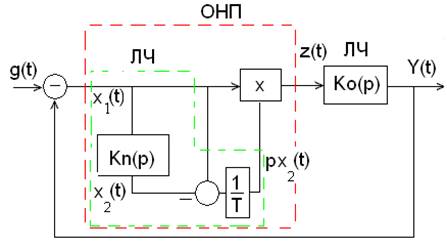
В структуру, как следует из рис., введены линейный преобразователь 1/Т и нелинейный блок умножения. Здесь ОНП - общий нелинейный преобразователь.
Система второго класса обязательно содержит особое нелинейное звено (умножение, деление, возведение в степень), входящее составной частью в ОНП. Причем в системе оно одно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.