![]()
![]() Uц
(t)
Uц
(t)
![]()
![]() N
N
Рис. 5. 3. Модель ЦАП в блоке "2".
Блок ЦАП "2" (см. рис.2. 3) с
линеаризованной характеристикой и коэффициентом передачи ![]() и помехой UЦ(t) изображен на рис.5. 3.
и помехой UЦ(t) изображен на рис.5. 3.
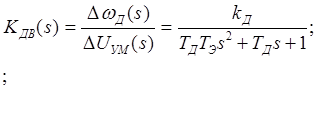
После этих преобразований расчетная модель ДСАУ приобретает вид рис 6. 3.
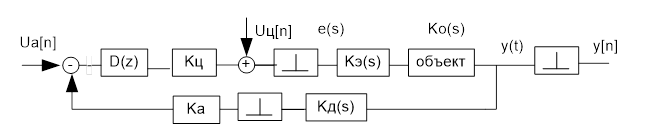
Рис. 6. 3.Расчетная модель помех в ДСАУ.
Здесь ![]() , сигнал управления g(t) =
0, считаем сигналом на входе помеху UA[n,
, сигнал управления g(t) =
0, считаем сигналом на входе помеху UA[n,![]() ].
].
Следует
выбрать АЦП и ЦАП с равными аналоговыми квантами, тогда соблюдается такое
равенство ![]()
 (1. 3.)
(1. 3.)
Яков Залманович Цыпкин, предложил считать UA[n], и UЦ[n] - случайными величинами, типа белого шума, тогда:е
 (2. 3.)
(2. 3.)
Спектральная плотность входных сигналов, в плоскости "w"будет.
 (3. 3)
(3. 3)
Для дисперсии непрерывной функции имеём такое выражение :
 (4. 3.)
(4. 3.)
Здесь полагаем, что спектральная плотность сигнала выхода Sу(ω) будет такой:
![]() .
(5.3.)
.
(5.3.)
4.3.Погрешности от шумов квантования в преобразователях информации ДСАУ
По аналогии с выражениями (4.3.) и (5.3.) могут быть вычислены.
Дисперсия составляющей ошибки АЦП:
 (6.3.)
(6.3.)
Дисперсия составляющей ошибки ЦАП:
 (7.3)
(7.3)
Примечание 2.
Покажем преобразование формулы (4. 3.),с помощью выражений [(1.
3) - (4. 3.)], на примере
(6. 3).Поскольку белый шум имеет постоянную амплитуду [см.
выражение (2. 3)], то эта постоянная величина ![]() может быть выведена из под
интеграла. Кроме того, функция
может быть выведена из под
интеграла. Кроме того, функция ![]() - четно -
симметричная. Поэтому интеграл (4. 3)может быть записан так
- четно -
симметричная. Поэтому интеграл (4. 3)может быть записан так  .Теперь заменим dω. Используем выражение:
.Теперь заменим dω. Используем выражение:
![]() , тогда
, тогда ![]()
Отсюда  .
.
Следовательно
 , но
, но![]() .
.
Поэтому  .Отсюда имеем:
.Отсюда имеем: (*)
(*)
Последнее выражение (*) определяет значения коэффициентов и окончательный вид
формул (6. 3.) и (7.3.)
Сложности
исследования не ограничиваются только этим. Вычисление определенных интегралов
(6. 3.) и (7. 3.) выполняются по известной в Теории управления теореме (закону)"Парсеваля
- Релея",( которую изучали в первой части курсаТУ) [52, часть1]. Известно,
что погрешность от "шума "квантования может быть бóльшей на
"смещенных" характеристиках, поэтому принимают ![]() и вычисляют
и вычисляют
![]() ,
(8. 3.)
,
(8. 3.)
где![]() среднеквадратичное значение
амплитуды стационарных колебаний угловой скорости привода, вызванное шумами
квантования преобразователей информации.
среднеквадратичное значение
амплитуды стационарных колебаний угловой скорости привода, вызванное шумами
квантования преобразователей информации.
Величину σ ш необходимо "увязать" со значением предельного значения коэффициента неравномерности вращения к н , указанного в табл. 2 при заданном ( или требуемом в техническом задании ) диапазоне регулирования скорости привода.
![]() ,
(9. 3)
,
(9. 3)
где γ допустимая доля σ ш в максимальном отклонении Δωmax угловой скорости привода в режиме стационарных колебаний.
В свою очередь Δωmax можно определить следующим образом:
![]() ,
(10.3)
,
(10.3)
где ω0 среднее значение угловой скорости привода в данном диапазоне и к н относительная величина в данном диапазоне (см. табл.2)
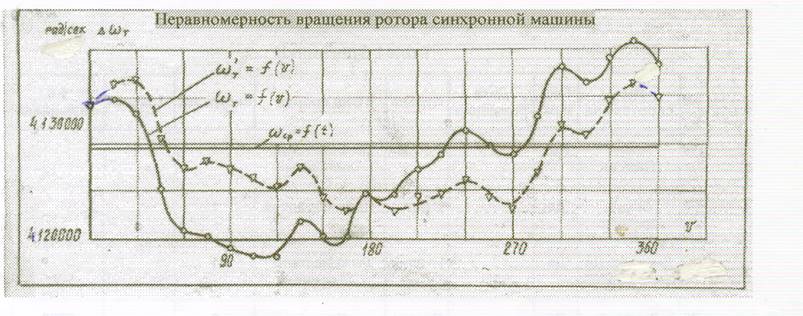
Примечание 3.Рассмотрим конкретный, но очень важный пример. Как было показано в диссертации П. Факадея (см стр. 4 текста данной лекции) шумы квантования преобразователей информации несущественно изменят суммарную статическую ошибку системы привода. Но иначе обстоит дело со стационарными колебаниями скорости . На рис.7. 3. мы приводим экспериментально полученную зависимость мгновенной скорости вращения вала синхронной машины. Её номинальная скорость 157рад\с, средняя скорость
ω0=4,1267228рад\с. Диапазон регулирования скорости:
![]()
Колебания,
вызванные изменением сил трения в опорах подшипников качения, Δ![]() =0,00616рад\с. Колебания,
вызванные изменением сил трения в опорах подшипников качения и асимметрией
питания статора , Δ
=0,00616рад\с. Колебания,
вызванные изменением сил трения в опорах подшипников качения и асимметрией
питания статора , Δ![]() =0,00913рад\с.
=0,00913рад\с.
 |
При диапазоне регулирования скорости до d=1:100
получим ![]() рад\с .
рад\с .
По
формуле (10. 3) можно определить допустимую величину γ=0,8 для расчета![]() , т.к. доля прочих возмущений
невелика (не более 15%).
, т.к. доля прочих возмущений
невелика (не более 15%).
![]() 0,1468
0,1468
Но, если диапазон регулироваприя скорости расширить до d=1:1000, то только относительное значение δАТ составит 146%. Поэтому нужно будет думать о снижении потерь в станке повышении точности подшипников двигателя, точности преобразователя частоты , замене в приводе синхронного двигателя и прочих возникших проблемах, а не "шумах"
АЦП и ЦАП.
Лекцию записал Дробинский Д.16.10 2009, скорректировал Живописцев Д.С. 29.10.10
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.