Современные проблемы автоматизации и управления
Лекции проф. для магистров
Лекции 5и.6 (16.10.10, 23.10.10 оригинал 16.10.2009г ).
Содержание предыдущей лекции. Кратко изложена методика получения погрешностей преобразования информации во временной области в аналоговых (непрерывных) и дискретных САУ. Приведены решения примеров использования этого метода и сделаны необходимые выводы.
Глава 3. Методы оценки шумов квантования по уровню дискретных преобразователей информации в ЭМС
3.1 Исходные положения
Эта задача в ряде практических применений ДСАУ превращается в "проблему", препятствующую повышению качества и точности реализуемых технических устройств.
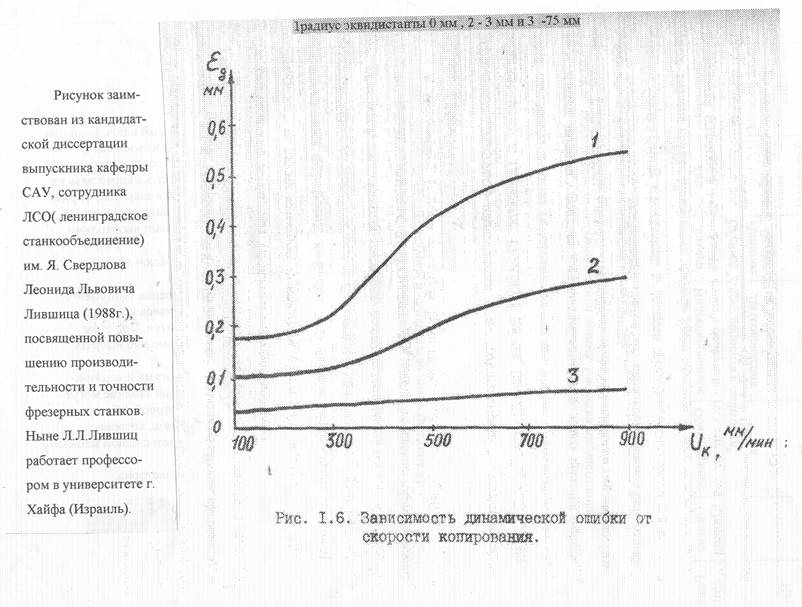
Например, на рис 1.3 приведены зависимости динамических ошибок εд обработки изделий на копировально - фрезерных станках, которые были достижимы в 90 - е годы XX века на станках ведущих мировых фирм. При этом скорость формирования изделий в режимах программного управления (ПУ) была(4 - 6) м\мин и реже достигала 9 м\мин. Динамические ошибки εд составляли (20 - 40 - 100)мкм
Рис. 1.3.
 |
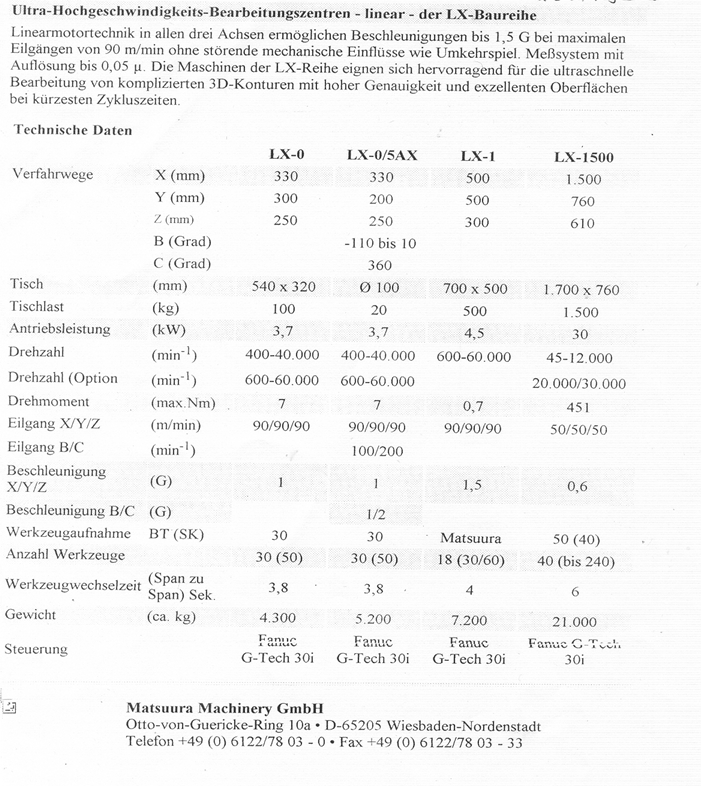
Однако за прошедшие 20лет положение в этой отрасли
техники существенно изменилось. Сегодня, например, швейцарско - японская фирма 'Matsuura Machinery " GmbH предлагает гамму станков с УЧПУ (устройство числового
программного управления) ,линейными системами приводов, скоростью изготовления
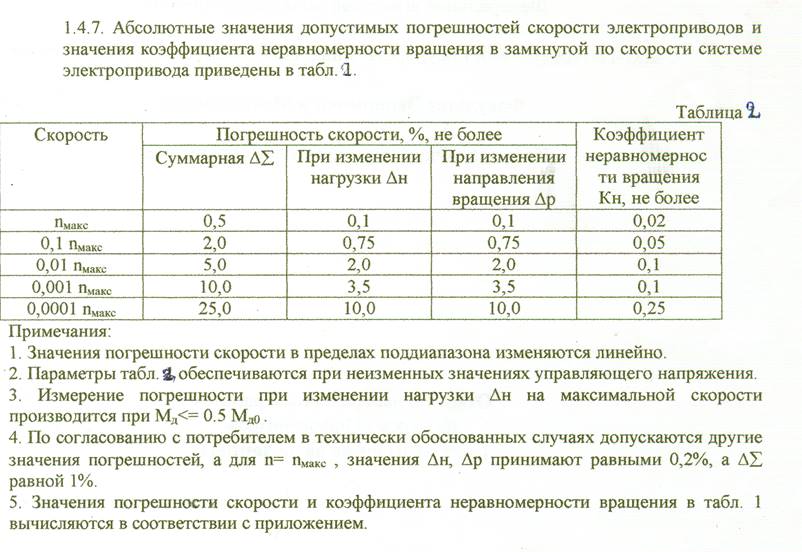
изделий*) до Vmax![]() 90 м/мин и системой измерения погрешностей их обработки до 0,05 мкн.(См.
табл.1)
90 м/мин и системой измерения погрешностей их обработки до 0,05 мкн.(См.
табл.1)
Таблица 1
2. 3.Основные вспомогательные данные
 |
______________________________________________________________
*)Не в режиме их копирования, как на рис.1. 3., а изготовления с помощью УЧПУ.
 |
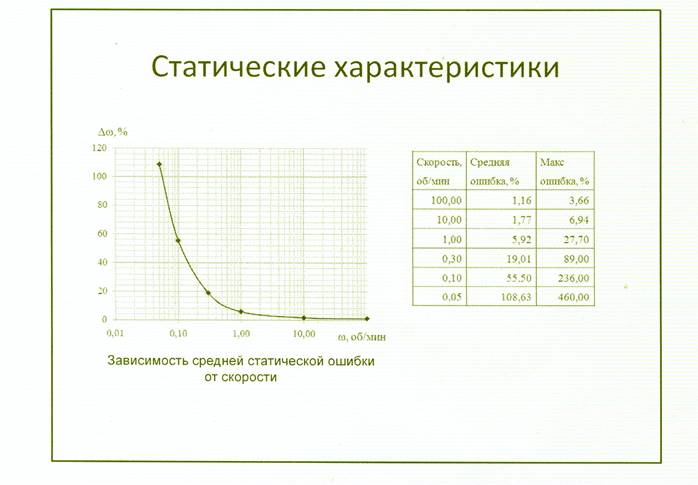 |
При заявленном в технических данных привода диапазоне регулирования скорости 1:3.000 имеем среднюю суммарную ошибку 5.92%, что вполне укладывается в данные табл.2, но коэффициент неравномерности вращения кн=55,4 % превышен в 5раз( при максимальной ошибке 27,7%), что очень плохо. При диапазоне регулирования 1:10.000 (nmin=0,3 об\ мин) средняя суммарная ошибка по частоте вращения на холостом ходу примерно20%,но кн=168%,что недопустимо. Эти исследования П. Факадея вновь подтвердили факт значительной неравномерности вращения любых машин переменного тока по сравнению с машинами постоянного тока при глубоком регулировании скорости вращения привода.
3.3. Основная расчетная модель ДСАУ, её передаточные функции и спектральные плотности случайных воздействий
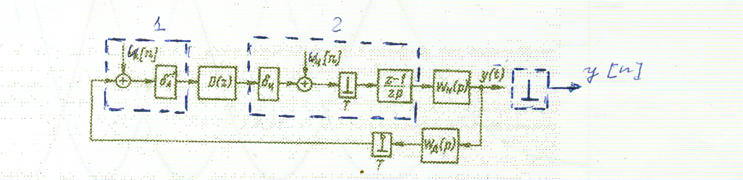
Для решения задачи в системах приводов станков с программным управлением. (УЧПУ) воспользуемся методикой, разработанной В. А. Бесекерским [28]. Предложенная им схема модели изображена на рис. 2. 3.
 |
Здесь
принято: UA[n] - дискретная помеха АЦП,UЦ[n] - дискретная помеха ЦАП (шумы квантования).Блок ![]() представляет модель
экстраполятора нулевого порядка, WН(p)=KO(s) – ПФ объекта управления. Фактически это ПФ всей ЭМС
координаты станка (усилителя мощности с системой управления), электродвигателя,
передаточного устройства и рабочих органов механизма (станка), без УЧПУ. WД(p)=KД(s) – ПФ аналогового датчика угловой скорости вала
двигателя. D(z,0) дискретная
ПФ (ДПФ) УЧПУ.
представляет модель
экстраполятора нулевого порядка, WН(p)=KO(s) – ПФ объекта управления. Фактически это ПФ всей ЭМС
координаты станка (усилителя мощности с системой управления), электродвигателя,
передаточного устройства и рабочих органов механизма (станка), без УЧПУ. WД(p)=KД(s) – ПФ аналогового датчика угловой скорости вала
двигателя. D(z,0) дискретная
ПФ (ДПФ) УЧПУ.
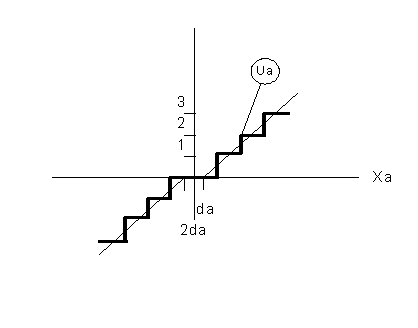
Рис.3. 3 Линеаризованная характеристика модели АЦП
Устраним также небольшую, но существенную, в рассчетном смысле, неточность, в модели, изображенной на рис. 2. 3.
Яков Залманович Цыпкин предложил использованную в
блоке "1" модель АЦП, как многопозиционное реле (рис 3. 3) с линеаризуемой
характеристикой, имеющей коэффициент передачи ![]() .Тогда
"зона нечувствительности" в такой линеаризуемой модели
уменьшается до 1
.Тогда
"зона нечувствительности" в такой линеаризуемой модели
уменьшается до 1![]() и помеха UA[n] добавляется к линеаризованной характеристике.
Полная модель блока "1"
и помеха UA[n] добавляется к линеаризованной характеристике.
Полная модель блока "1"
АЦП, приобретает вид, изображенный на рис.4. 3.

Рис. 4. 3. Модель АЦП в блоке "1."
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.