Интегрирование системы
дифференциальных уравнений на 1 шаг осуществляется с помощью стандартной
программы RKF45, что не является обяза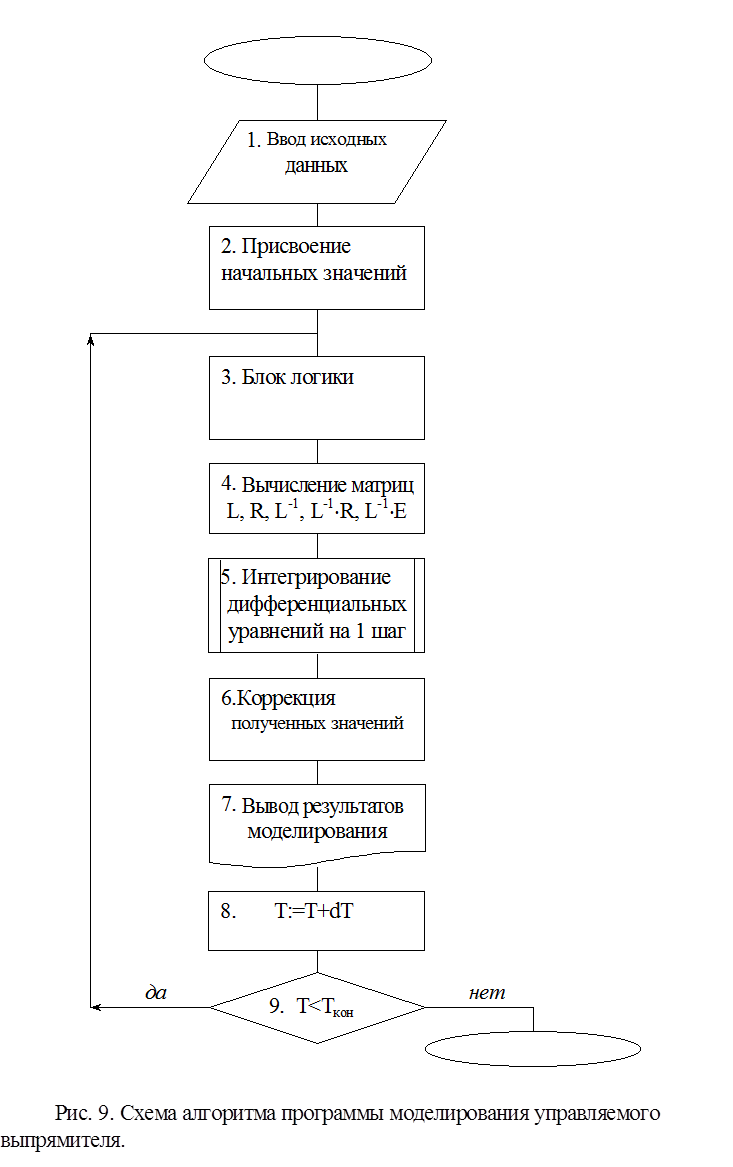
тельным. Пользователь может выполнить данную процедуру любым привычным для него методом. Вычисление правых частей системы дифференциальных уравнений производится отдельной подпрограммой FUN, являющейся внешней для RKF45. Часть вычислений (определение коэффициентов матриц L и R, обращение матрицы L, перемножение матриц) вынесена из подпрограммы FUN и выполняется на каждом шаге интегрирования до обращения к RKF45 (в блоке операторов 4). Здесь же размещены операторы, реализующие функции отпирания и запирания тиристоров (так называемый "БЛОК ЛОГИКИ"). Результаты этих вспомогательных вычислений передаются в подпрограмму вычисления правых частей через общую именованную область MATRIX. Следовательно, интегрирование системы на 1 шаг осуществляется при постоянных, предварительно определенных коэффициентах системы дифференциальных уравнений, зависящих от значений эквивалентных параметров диодов и тиристоров. Данный метод может быть назван методом интегрирования с "замороженными" (на один шаг) коэффициентами. На следующем шаге данные коэффициенты подлежат пересмотру в зависимости от состояния моделируемого выпрямителя (токов тиристоров и диодов, результатов моделирования системы управления выпрямителем). Результаты интегрирования выводятся на экран дисплея в виде графиков в темпе интегрирования. Предварительно для каждого из требуемых графиков созданы соответствующие окна. Описание используемого графического пакета имеется на VAX в файле ELMI:[SAU]PROBA.FOR. При желании можно организовать вывод результатов интегрирования в файл. Содержание блоков операторов 1 и 2 алгоритма рис.9 для данного примера ясно из текста программы и дополнительных комментариев не требует. Нуждается в пояснениях оператор 6, сопровожденный в программе комментарием как "необходимый для корректирования вычислительной погрешности". Необходимость этого оператора вызвана тем, что при интегрировании при постоянных параметрах на всей продолжительности шага интегрирования обязательно имеет место вычислительная погрешность. Как показывает опыт, эта погрешность имеет тенденцию к накапливанию, что, если не ввести данный оператор, может повлечь не только количественные искажения результатов, но и внести существенные нежелательные, необъяснимые изменения в процесс моделирования отпирания тиристоров. Величина шага интегрирования, что также определено опытным путем, должна быть порядка 0,000002 сек. Такое малое значение шага вызвано тем, что при интегрировании с "замороженными" на шаге коэффициентами программа "не реагирует" на изменение знака токов через тиристоры внутри шага, что может вызвать значительную вычислительную погрешность, которую другими способами скомпенсировать не удается. Значения эквивалентных параметров вентилей также определены в результате экспериментов и могут быть рекомендованы:
· для моделирования закрытого состояния - Rv = 10000 Om, Lv = 100 Гн;
· для моделирования открытого состояния - Rv = 0,001 Om, Lv =0,00001 Гн.
Последние рекомендации не являются обязательными. Установлено, что от величины этих параметров и пределов их изменения зависит оптимальная величина шага интегрирования, но это уже выходит за рамки данной работы.
Как было отмечено, при интегрировании системы дифференциальных уравнений (7) с переменными параметрами результаты интегрирования выводятся на экран в виде графиков. Данные графики содержат наглядную информацию о токах, протекающих через тиристоры, электродвигатель, о выходном напряжении выпрямителя. Построенная модель позволяет наблюдать и коммутационные процессы в выпрямителе. При необходимости, используя программную модель выпрямителя в качестве базовой и вводя в нее соответствующие операторы, можно получить и некоторые интегральные показатели:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.