 Процессы в
системах управления других схем выпрямителей незначительно отличаются от
рассматриваемого, поэтому при их моделировании может быть применен с
несущественными изменениями описанный ниже алгоритм.
Процессы в
системах управления других схем выпрямителей незначительно отличаются от
рассматриваемого, поэтому при их моделировании может быть применен с
несущественными изменениями описанный ниже алгоритм.
Четвертый этап моделирования реализуется в следующей последовательности:
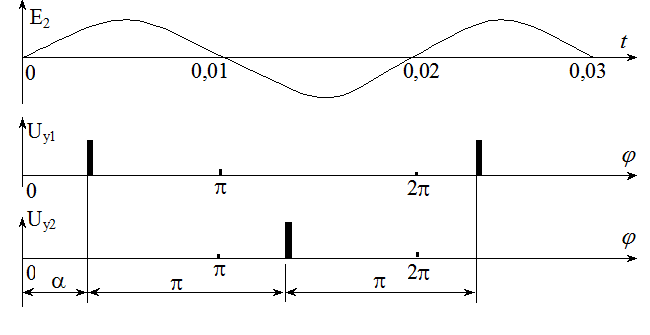
1. Для удобства моделирования работы системы управления целесообразно ввести относительное время периода, начальная точка отсчета которого совпадает с началом периода сетевого напряжения Е2. Таким образом, это относительное время, в зависимости от того, в каких единицах оно измеряется - секундах, градусах или радианах, будет изменяться от 0 до 0,02 сек., от 0 до 360 градусов, от 0 до 2p радиан соответственно. Причем следует иметь ввиду, что абсолютное время, в котором функционирует рассматриваемый управляемый выпрямитель, измеряемое в секундах, является определяющим для изменения относительного времени.
2. Формируется вектор АЛЬФА, размерность которого равна количеству управляемых вентилей (в данном примере это 2). Каждая компонента этого вектора несет в себе информацию о моменте формирования импульса для соответствующего тиристора в выбранном относительном времени.
Так, для рассматриваемой схемы (если относительное время измеряется в градусах)
АЛЬФА(1) = a ,
АЛЬФА(2) = a + 180.
В том случае, если задан слишком большой угол управления, может возникнуть ситуация, когда момент формирования импульса для тиристора (одного или нескольких) может оказаться за пределами рассматриваемого периода, то есть в следующем периоде. С учетом периодичности импульсов управления это означает, что в текущий период перейдет импульс управления из предыдущего периода.
Отмеченный факт реализуется в программе оператором:
ЕСЛИ {АЛЬФА(i) больше 360} то АЛЬФА(i):=АЛЬФА(i)-360.
Здесь в оператор для удобства введен индекс i, позволяющий организовать цикл по всем компонентам вектора АЛЬФА, если, конечно, в этом есть необходимость.
3. Определяется, наступил ли момент формирования импульса управления на соответствующий тиристор. Для этого осуществляется сравнение текущего значения относительного времени с установленным моментом формирования импульса (значением компоненты вектора АЛЬФА) по принципу работы всем известного будильника. Естественно, что сравнение нужно провести для всех компонентов АЛЬФА. В силу того, что интегрирование системы дифференциальных уравнений (7) производится пошаговым методом, абсолютное время меняется дискретно. Одновременно с ним дискретным образом меняется и относительное время. Поэтому при проведении сравнения значения относительного времени со значением компоненты АЛЬФА нужно ожидать совпадения этих значений с точностью до половины шага интегрирования (шага квантования), иными словами:
ЕСЛИ {ABS(относительное время - АЛЬФА(i)) меньше или равен ШАГ_КВАНТОВАНИЯ/2} ТО тиристор VDi пора отпирать.
Здесь индекс i также введен для организации формирования импульсов на любой (i-й) тиристор.
Процессы в системах управления других схем выпрямителей незначительно отличаются от рассмотренной, поэтому при их моделировании может быть применен с несущественными изменениями описанный алгоритм.
Все перечисленные действия, составляющие данный этап, программно реализуются в одном блоке, условно называемом "БЛОКОМ ЛОГИКИ". В этом блоке целесообразно расположить и операторы, моделирующие запирание тиристоров и функционирование диодов, в полном соответствии алгоритмам, приведенным при описании ПЕРВОГО ЭТАПА моделирования.
ПЯТЫЙ ЭТАП моделирования представляет собой написание программы решения системы дифференциальных уравнений (7) при одновременном изменении коэффициентов матриц R, L, A, векторов Е и В в зависимости от состояния тиристоров и диодов.
Алгоритм программы (рис.9) выполнен в соответствии с общими принципами численного интегрирования произвольной системы дифференциальных уравнений в форме Коши. Программа (Приложение 1) написана на языке ФОРТРАН применительно к среде VAX и с незначительными переделками может быть реализована в любой операционной системе.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.