Сила инерции Рj обусловлена неравномерностью поступательного движения автомобиля и его вращающихся масс при изменении скорости
![]() (4.7)
(4.7)
Коэффициент учета вращающихся масс автомобиля рассчитывается по формуле
![]() (4.8)
(4.8)
где mx – фактическая масса автомобиля.
Сила сопротивления движению прицепа Рпр обусловлена теми же факторами, что и сопротивление движению автомобиля, поэтому определяется аналогично
![]() (4.9)
(4.9)
Сила суммарного сопротивления дороги
![]() (4.10)
(4.10)
Дифференциальное уравнение движения одиночного автомобиля с механической трансмиссией выразится как
![]() (4.11)
(4.11)
При рассмотрении движения автопоезда массой mап как единой системы уравнение движения аналогично уравнению (3.11)
![]() (4.12)
(4.12)
где
![]()
Для движения одиночного автомобиля с постоянной скоростью уравнение (4.11) примет вид
![]() (4.13)
(4.13)
Уравнения (4.11-4.13) позволяют проанализировать влияние параметров автомобиля на характеристики движения и дать оценку показателей его тягово-скоростных свойств в конкретных дорожных условиях. Их решение осуществляют графоаналитическим методом.
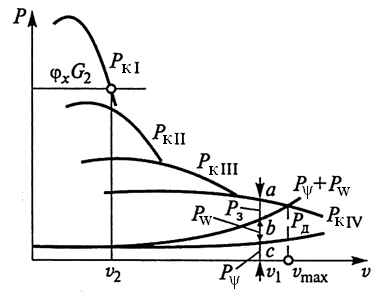
Рисунок 4.1 - Тяговый баланс автомобиля
Вначале строят тяговую характеристику автомобиля (рис. 4.1). B нижней части графика наносят кривую Рψ, построенную для одного значения коэффициента сопротивления дороги ψ. Значение силы Рw откладывают вверх от соответствующих значений слы Рψ. Кривая суммарного сопротивления Рψ+Рw определяет силу тяги, необходимую для движения автомобиля с постоянной скоростью. Если кривая Рк(Рк1-Pк1V в зависимости от числа передач) проходит выше кривой Рψ+Рw, то отрезки Рз, заключенные между этими кривыми, представляют собой нереализованную часть (запас) силы тяги,которую можно использовать для преодоления повышенного сопротивления дороги или для разгона автомобиля.
С помощью графика тягового баланса можно определить основные показатели динамичности автомобиля при равномерном движении. Например, максимальную скорость Vmax определяют по абсциссе точки пересечения кривых Рк и Рψ+Рw, когда запас силы тяги, а следовательно, и ускорение равны нулю. Если кривая Рк проходит ниже кривой Рψ+Рw, то автомобиль может двигаться только замедленно.
Для определения максимального сопротивления дороги, которое может преодолеть автомобиль при равномерном движении, например, со скоростью V1 нужно из ординаты Рк вычесть отрезок b, равный в выбранном масштабе силе Рw. Сумма отрезков а и с в том же масштабе представляет собой силу Рψ при максимальном коэффициенте ψ.
Для того чтобы учесть возможность буксования ведущих колес, нужно, определив для заданного коэффициента сцепления силу сцепления Рφ=φхG2, провести горизонтальную линию. В зоне, расположенной ниже этой линии, соблюдается условие Рк<Pφ, а в зоне выше нее длительное движение автомобиля невозможно.
Для рассматриваемого примера безостановочное движение автомобиля на четвертой, третьей и второй передачах возможно во всем интервале скоростей от минимальной до максимальной.
На первой передаче движение автомобиля без буксования колес при полной нагрузке двигателя возможно лишь со скоростью, большей или равной скорости V2.
Для движения на первой передаче со скоростью, которая меньше скорости V2, необходимо прикрыть дроссельную заслонку, чтобы уменьшить силу тяги.
4.3. Динамическая характеристика автомобиля
Уравнение движения автомобиля (4.11) можно записать в виде
![]() (4.14)
(4.14)
Отношение в левой части уравнения (3.14) называются динамическим фактором автомобиля
![]() (4.15)
(4.15)
Динамический фактор – это безразмерная величина, характеризующая потенциальные тяговые и скоростные свойства автомобиля. Графическое изображение зависимости динамического фактора от скорости движения D=f(V) на всех передачах трансмиссии при полной массе mа называется динамической характеристикой автомобиля.
Для расчета и построения динамической характеристики D=f(V) используются исходные данные и результаты тягового расчета автомобиля. Расчет динамического фактора по (4.15.) осуществляется на каждой передаче для 4-5 характерных режимов по скоростной (регуляторной) характеристике двигателя при массе автомобиля mо и mа.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.