Построим ЛАЧХ, ЖЛАЧХ, ЛАЧХ КУ привода. Для начала определим координаты рабочей точки А(lg(wp), 20lg(β0/δгар))
где β0 – угол качения на входе привода
wp = εн/Ωн = 1,8/1,8 = 1 с-1
lg 1 = 0
β0 = Ωн2/ εн = 1,8 рад
20lg(β0/δгар) = 20lg(1,8*60*57/30) = 46,24
А(0, 46,24)
Определим ограничивающие асимптоты:
![]() дБ
дБ
![]() дБ
дБ
ТМ = 0,065 => wМ = 1/0,065 = 15,38 => lg(wМ) = 1.18
![]()
ЛАЧХ показана на рисунке 6.
Рисунок 6 – ЛАЧХ, ЖЛАЧХ, ЛАЧХ КУ
Из графика ЛАЧХ определим:
lg(wa) = 0.27 => wa = 1.86 c-1 => Ta = 1/1.86 = 0.53
lg(w1) = 0.825 => w1 = 6.68 c-1 => T1 = 1/6.68 = 0.15
lg(w2) = 1.2 => w2 = 15.8 c-1 => T2 = 1/15.8 = 0.063
lg(wb) = 1.8 => wb = 63.09 c-1 => Tb = 1/63.09 = 0.015
Рассчитаем параметры RC-цепочки рисунок 7.
 R2
R2
C2 R1
C1
Рисунок 7 - RC-цепочка
Принимаем С1 = 10 мкФ =>
R1 = T1/C1 = 0,15/0,0001 = 15 кОм
R2 = ((Ta + Tb) - (T2 + T1))/C1 = (0,552 – 0,21)/0,0001 = 34,2 кОм
C2 = T2/R2 = 0,063/34200 = 18,5 мкФ
Передаточная функция корректирующего устройства:
Wky(p) = (1/(Tap+1))*(T1p+1)*(T2p+1)*(1/(Tbp+1))
Wky(p) = (1/(0.53p+1))*(0.15p+1)*(0.063p+1)*(1/(0.015p+1))
Передаточная функция скорректированного привода определяется:
Wжел(р)=Wαβ(p)* Wky(p)
|
|
|
|
|
|
Воспользуемся пакетом MAthLab
W=tf([1026], [0.325 5 1026])
Transfer function:
1026
---------------------0.325 s^2 + 5 s + 1026
Рассчитаем передаточную функцию скорректированной системы:
W=tf([36 1000], [10.3 178.5 35679 93600 6426000])
Transfer function:
36 s + 1000
-----------------------------------------------------10.3 s^4 + 178.5 s^3 + 35679 s^2 + 93600 s + 6.426e006
Построим переходные характеристики не скорректированного привода и привода после коррекции.
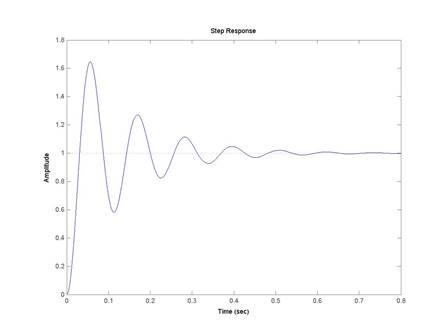
Рисунок 8 – Переходный процесс нескорректированного привода
1. Время переходного процесса системы – это время регулирования системы, определяется как интервал времени от момента приложения какого-либо воздействия на систему до времени вхождения системы в 5% трубку. tn = 0,8 секунд.
2. Перерегулирование (максимальная динамическая ошибка)
![]()
3. Колебательность – число колебаний системы от момента воздействия на нее до перехода в установившееся состояние N=6
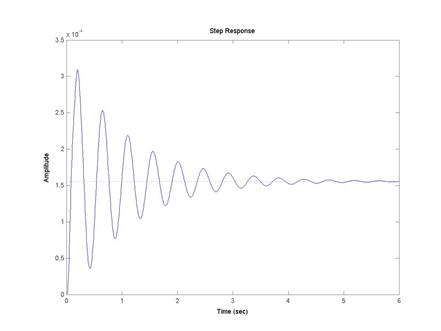
Рисунок 9 – Переходный процесс скорректированного привода
4. Время переходного процесса системы – это время регулирования системы, определяется как интервал времени от момента приложения какого-либо воздействия на систему до времени вхождения системы в 5% трубку. tn = 6 секунд.
5. Перерегулирование (максимальная динамическая ошибка)
![]()
6. Колебательность – число колебаний системы от момента воздействия на нее до перехода в установившееся состояние N=13
ЗАКЛЮЧЕНИЕ
В ходе расчетно-графической работы был разработан и рассчитан следящий привод, обеспечивающий слежение объектом регулирования за углом поворота задающего устройства с требуемой точностью δгар при гармоническом входном воздействии.
Также была рассчитана, подобрана и проверена элементная база привода. Так как работа системы привода была не устойчива, я сделал корректировку путем введения RC-цепочки, после чего система стала удовлетворять требованиям работоспособности.
По графику переходного процесса скорректированной системы привода были определены прямые оценки качества системы.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.