Область насыщения, присутствующая на графиках, является результатом настройки регулятора, при которой сигнал ограничен областью (-5.1, 5.1)В.
4.3. Исследование работы регулятора при подаче на его вход синусоидального сигнала
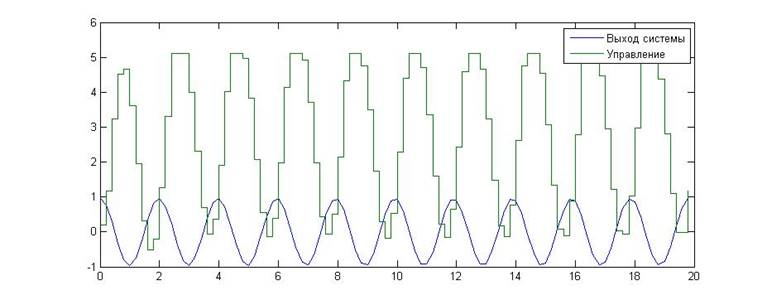
Рис.14. Временные диаграммы работы ПИД-регулятора при KП=1, KИ=1, KД=1, N=100, TП=200мс
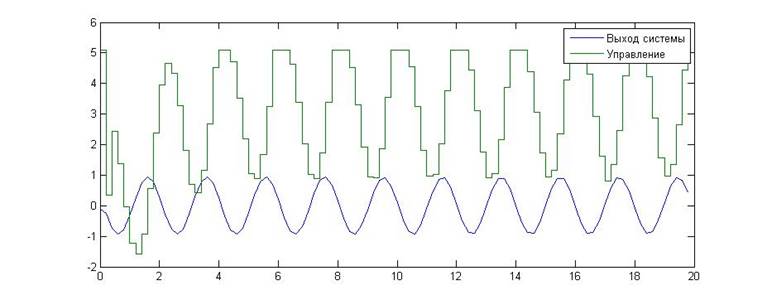
Рис.15. Временные диаграммы работы ПИД-регулятора при KП=0, KИ=1, KД=1, N=100, TП=200мс
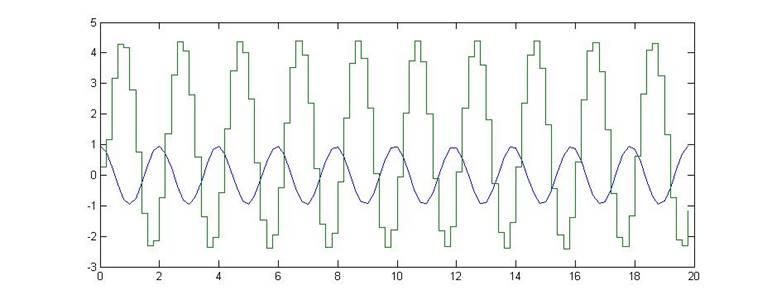
Рис.16. Временные диаграммы работы ПИД-регулятора при KП=1, KИ=0, KД=1, N=100, TП=200мс
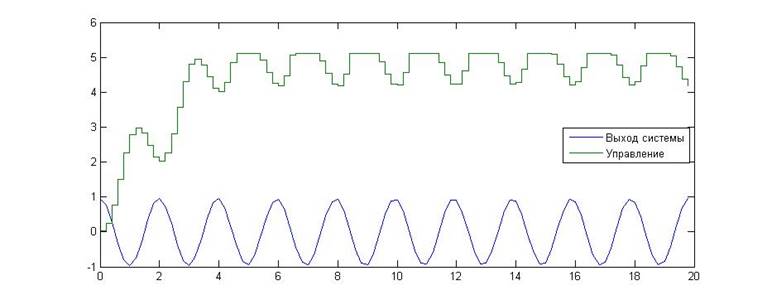
Рис.17. Временные диаграммы работы ПИД-регулятора при KП=1, KИ=1, KД=0, N=100, TП=200мс
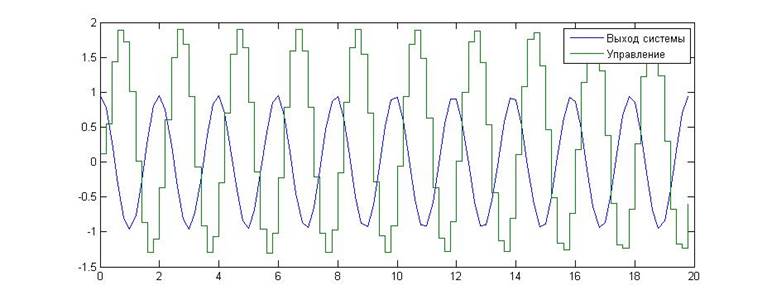
Рис.18. Временные диаграммы работы ПИД-регулятора при KП=0.3, KИ=0, KД=0.5, N=100, TП=200мс
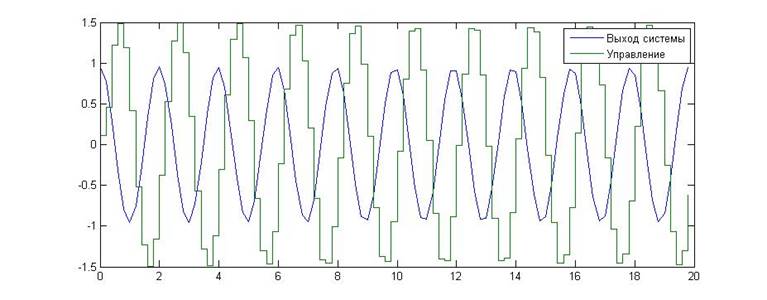
Рис.19. Временные диаграммы работы ПИД-регулятора при KП=0, KИ=0, KД=0.5, N=100, TП=200мс

Рис.20. Временные диаграммы работы ПИД-регулятора при KП=0, KИ=0, KД=0.3, N=100, TП=200мс

Рис.21. Временные диаграммы работы ПИД-регулятора при KП=0, KИ=0, KД=0.3, N=100, TП=100мс
Как видно из приведенных графиков, в данном случае наилучшее качество регулирования достигается при использовании всех составляющих ПИД-регулятора, однако, как и ранее, окончательное решение об использовании той или иной составляющей принимается, исходя из требуемого качества управления. Из графиков видно, что даже при использовании только Д-составляющей форма сигнала остается, несмотря на искажения, остается узнаваемой. Однако при воздействии на сигнал внешних помех данного вида управления будет недостаточно.
Также следует отметить, что в случае с данным сигналом уменьшение периода опроса при прочих равных ведет к улучшению качества управления. но это правило действует только при отсутствии внешних помех.
4.4. Исследование работы регулятора при подаче на его вход случайного сигнала
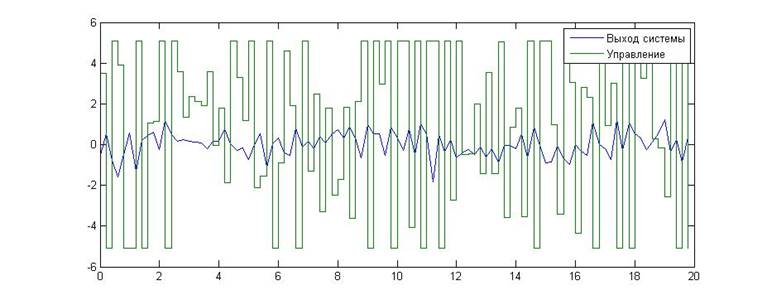
Рис.22. Временные диаграммы работы ПИД-регулятора при KП1, KИ=1, KД=1, N=100, TП=200мс
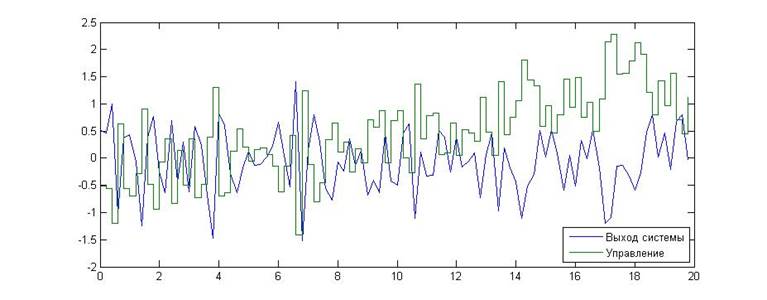
Рис.23. Временные диаграммы работы ПИД-регулятора при KП=1, KИ=1, KД=0, N=100, TП=200мс
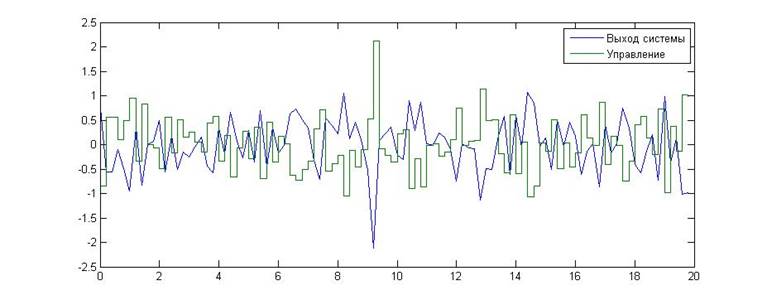
Рис.24. Временные диаграммы работы ПИД-регулятора при KП=1, KИ=0, KД=0, N=100, TП=200мс
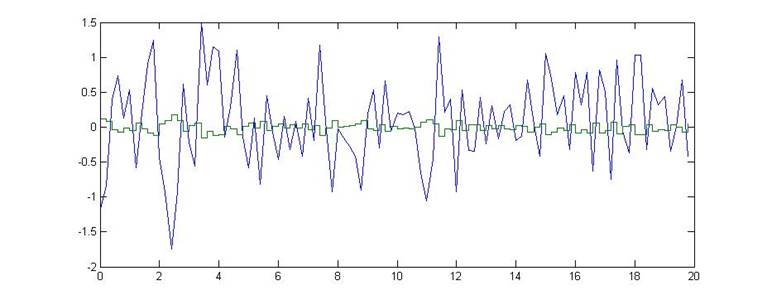
Рис.25. Временные диаграммы работы ПИД-регулятора при KП=0.1, KИ=0, KД=0, N=100, TП=200мс
Как видно из приведенных графиков, в данном случае наилучшее качество управления достигается при использовании всех составляющих фильтра. Однако из-за ограничений ПИД-регулятора сигнал управления, выходящий за пределы допустимого диапазона, не может полностью компенсировать сигнал помехи.
В данном случае использование малых периодов опроса становится опасным, так как в этом случае регулятор будет принимать сигнал помехи за полезный сигнал, что окажет отрицательное воздействие на работу системы.
5. Выводы
В ходе выполнения данной работы было исследовано поведение ПИД-регулятора при подаче на его вход типовых сигналов (постоянного, линейно-возрастающего, синусоидального, случайного). По результатам выполнения можно сделать вывод о том, что использование всех трех составляющих ПИД-регулятора не всегда является необходимым. Если требуемое качество управления достижимо и без использования всех составляющих регулятора, разумнее будет обойтись без чрезмерного усложнения системы.
ПИД-регулятор состоит из трех составляющих: пропорциональной, которая вырабатывает выходной сигнал, противодействующий отклонению регулируемой величины от заданного значения, наблюдаемому в данный момент времени; интегральной, которая используется для устранения статической ошибки; дифференциальной, которая противодействует предполагаемым отклонениям регулируемой величины, которые могут произойти в будущем.
Период опроса системы регулятором влияет на точность регулирования высокочастотных сигналов, но в случае наличия в исходном сигнале помех (которые присутствуют в реальных сигналах практически всегда) малые периоды опроса могут негативно отразиться на работе системы, так как регулятор будет воспринимать сигнал помехи в качестве полезного. В случае необходимости использования таких периодов опроса в систему необходимо усложнить, добавив в нее фильтр.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.