Санкт-Петербургский Государственный Политехнический Университет
Факультет Технической Кибернетики
Кафедра Компьютерных Систем и Программных Технологий
ОТЧЕТ
по лабораторной работе №5.1
«Исследование системы компьютерного управления с ПИД-регулятором»
по предмету «Компьютерные системы управления»
Работу выполнили студент группы 5081/1
студентка группы 5081/10
Преподаватель ____________
Санкт-Петербург
2011
1. Цель работы
Изучение алгоритмических способов и особенностей формирования управляющих воздействий цифровыми ПИД-регуляторами (промышленными регуляторами). Ознакомление с организацией цифрового управления на примере систем, реализующих типовые законы промышленных регуляторов. Исследование влияния параметров систем цифрового управления на устойчивость системы и качество процессов управления.
2. Методика исследования
Данная работа предусматривает исследование ПИД-регулятора при подаче на его вход типовых сигналов (ступенчатого, линейно-возрастающего и синусоидального) для различных значений KП, KИ, KД, Т0, xуст.
Уравнение ПИД-регулятора в непрерывной форме можно записать следующим образом:
![]()
e(t)=xуст-x(t) – рассогласование управляемой координаты и уставки (ошибка управления).
В дискретной форме при использовании интегрирования по методу прямоугольников и замене дифференцирования операцией взятия конечной разности, данное уравнение можно записать в виде:

KИД=T0/T=KИT0
KДД=TД/T0=KД/T0
KИ=1/T
KД=TД
В рекуррентной форме ПИД-закон имеет вид:
![]()
q1=KП+KДД
q2=KИД-KП-2KДД
q3=KДД
Начальное значение рекуррентной формы можно получить, положив k=0:
u(0)=q1e(0)=(KП+KДД)e(0)
Изменяя коэффициенты KП, KИД, KДД, можно получить рекуррентную форму для П-, ПИ-, ПД-, И- законов управления.
3. Исходные данные
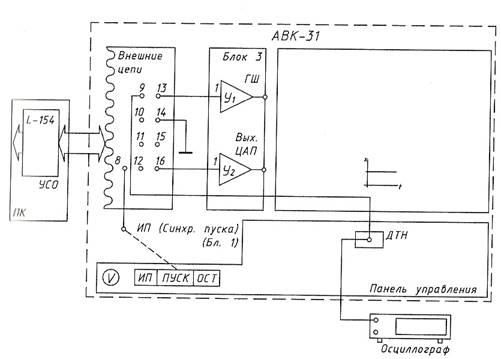
Рис.1. Схема для исследования регулятора при подаче на его вход постоянного сигнала
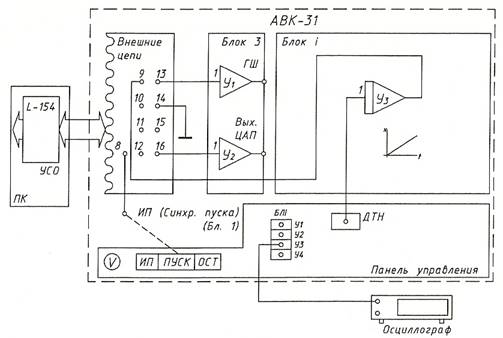
Рис.2. Схема для исследования регулятора при подаче на его вход линейно-возрастающего сигнала
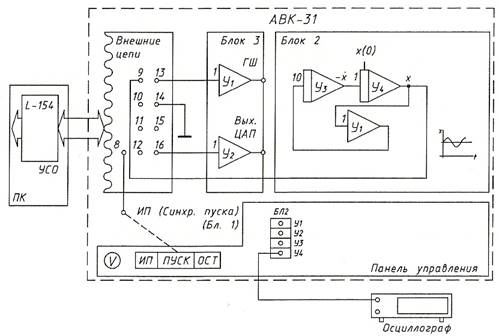
Рис.3. Схема для исследования регулятора при подаче на его вход синусоидального сигнала
4. Экспериментальное исследование
После подачи на вход регулятора некоторого сигнала будем производить настройку коэффициентов таким образом, чтобы добиться наилучшего управления.
4.1. Исследование работы регулятора при подаче на его вход постоянного сигнала
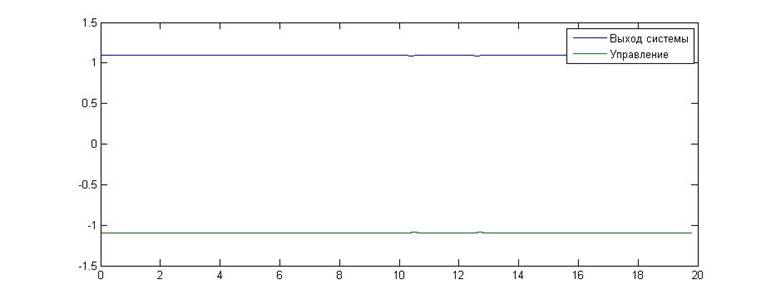
Рис.4. Временные диаграммы работы ПИД-регулятора при KП=1, KИ=0, KД=0, N=100, TП=200мс

Рис.5. Временные диаграммы работы ПИД-регулятора при KП=-1, KИ=0.5, KД=0, N=100, TП=200мс
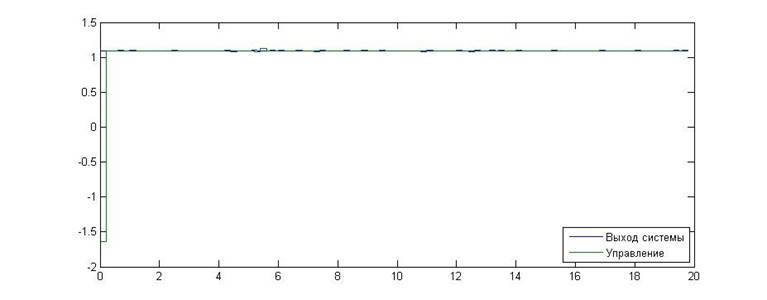
Рис.6. Временные диаграммы работы ПИД-регулятора при KП=-1, KИ=0, KД=0.5, N=100, TП=200мс
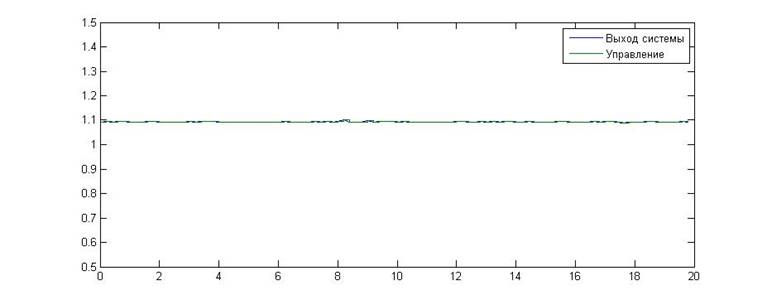
Рис.7. Временные диаграммы работы ПИД-регулятора при KП=-1, KИ=0, KД=0, N=100, TП=200мс
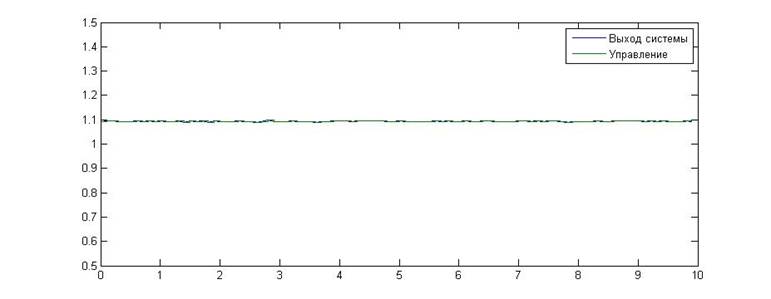
Рис.8. Временные диаграммы работы ПИД-регулятора при KП=-1, KИ=0, KД=0, N=100, TП=100мс
Как видно из приведенных графиков, качество управления возрастает с увеличением числа используемых составляющих ПИД-регулятора. Однако вопрос целесообразности использования той или иной составляющей решается исходя из требуемого качества управления. В общем случае для обеспечения требуемого вида сигнала достаточно будет только П-составляющей.
Период опроса влияет на количество снятых точек за единицу времени и, таким образом, может увеличить точность при задаче регулирования быстро меняющегося во времени сигнала. Однако в данном случае малый период опроса является избыточным.
4.2. Исследование работы регулятора при подаче на его вход линейно-возрастающего сигнала
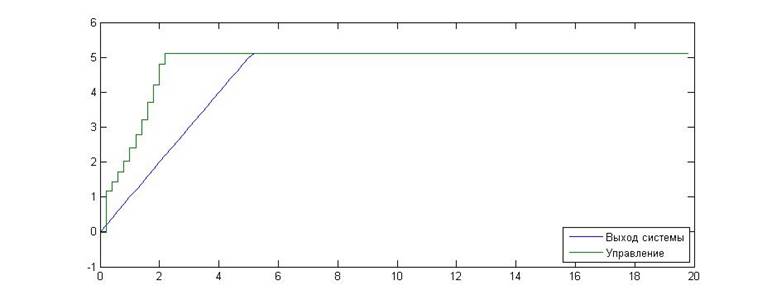
Рис.9. Временные диаграммы работы ПИД-регулятора при KП=-1, KИ=-1, KД=-1, N=100, TП=200мс
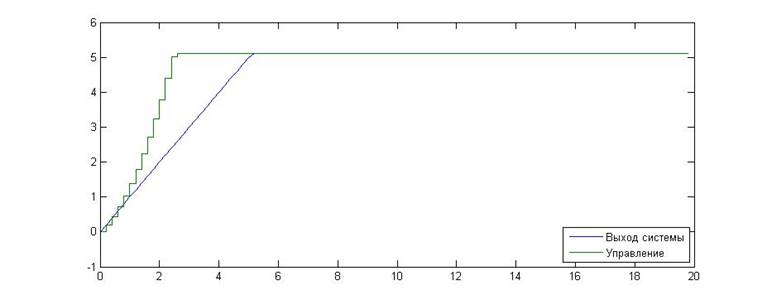
Рис.10. Временные диаграммы работы ПИД-регулятора при KП=-1, KИ=-1, KД=0, N=100, TП=200мс
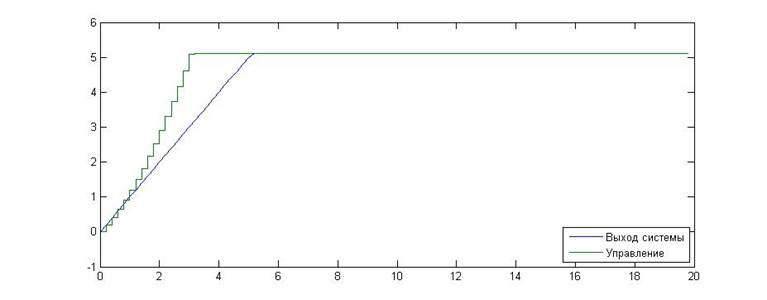
Рис.11. Временные диаграммы работы ПИД-регулятора при KП=-1, KИ=-0.5, KД=0, N=100, TП=200мс
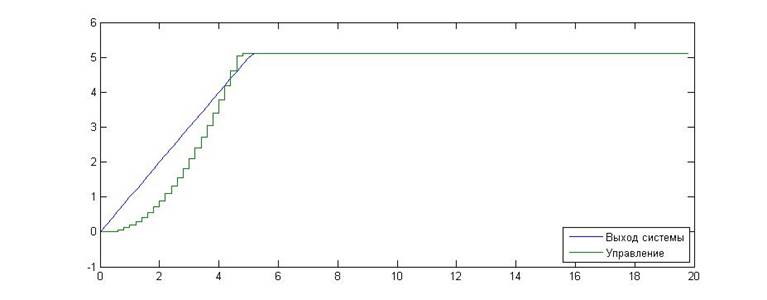
Рис.12. Временные диаграммы работы ПИД-регулятора при KП=0, KИ=-0.5, KД=0, N=100, TП=200мс
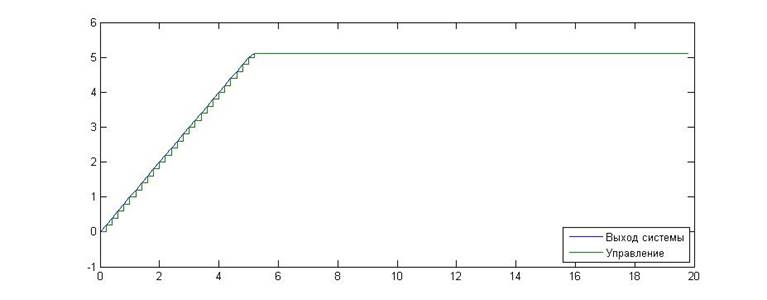
Рис.13. Временные диаграммы работы ПИД-регулятора при KП=-1, KИ=0, KД=0, N=100, TП=200мс
Как видно из приведенных графиков, в данном случае ПИД-регулятор старается противодействовать изменению сигнала (на данных графиках управление инвертировано из-за подачи отрицательных коэффициентов).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




