Санкт-Петербургский государственный политехнический университет
Факультет технической кибернетики
Кафедра автоматики и вычислительной техники
Дисциплина: компьютерные системы управления
Тема: исследование систем управления с «внешнем» запаздыванием
Выполнил студент гр. 5081/1
Проверил:
Санкт-Петербург
2009
1. Цель работы
Оценивание влияния запаздывания на качество процессов управления, реализуемого промышленными регуляторами. Рассмотрение запаздывания в случаях:
- задержка по входному сигналу или задержка сигнала управления
- задержка по выходному сигналу или задержка по измерению
2. Теоретические сведения
Внешним запаздыванием будем называть задержку сигнала элементами системы внешними по отношению к управляющему устройству. Как правило, внешнее запаздывание обусловлено задержками передачи сигналов от управляющего устройства (регулятора) к объекту и от объекта – к регулятору в системах телеуправления и телеизмерения.
Модели объектов с запаздыванием ![]() на входе и выходе дискретной системы
можно представить в виде:
на входе и выходе дискретной системы
можно представить в виде:
а) модель с задержкой по входу:
![]()
б) модель с задержкой по выходу:
 или
или
 , где
, где
![]() -
координаты состояния,
-
координаты состояния,
![]() -
измеряемые координаты,
-
измеряемые координаты,
![]() -
управление,
-
управление,
![]() -
дискретное время в единицах
-
дискретное время в единицах ![]() (
(![]() ),
),
![]() -
задержка
-
задержка ![]() , в единицах
, в единицах ![]() (
(![]() ).
).
Запаздывание можно представить в
виде совокупности ![]() единичных задержек,
помещаемых на входе и на выходе системы.
единичных задержек,
помещаемых на входе и на выходе системы.
На рис.2.1а и рис.2.1б приведены
структурные схемы объекта управления с задержкой соответственно на входе и на
выходе (элементы ![]() означают задержку
информации на один интервал квантования
означают задержку
информации на один интервал квантования ![]() ).
).
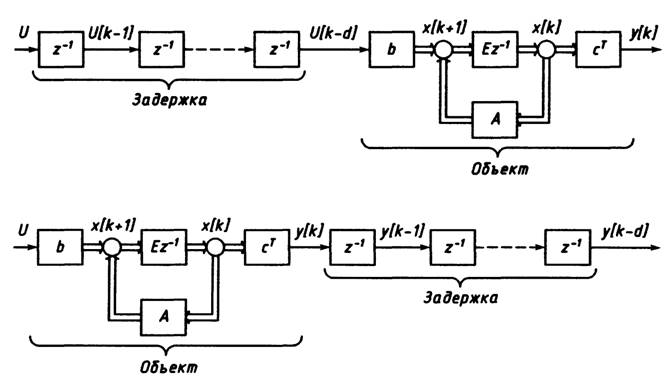 а)
а)
б)
Рис. 2.1. Структурные схемы объекта с задержкой.
В целом структуры систем с задержкой по входу и выходу показаны на рис. 2.2а и рис. 2.2б.
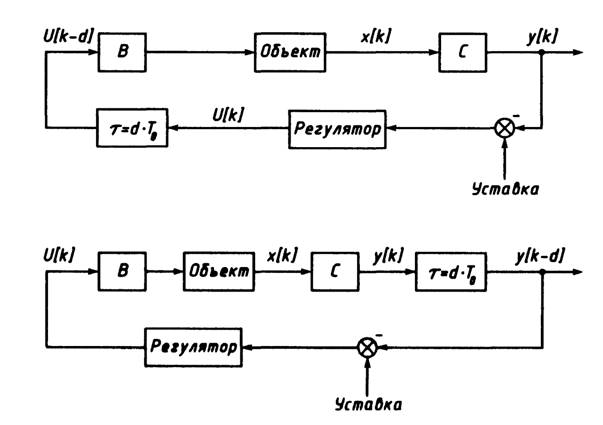
а)
б)
Рис. 2.2. Структурные схемы систем с задержкой.
В данной работе проводится моделирование объекта, заданного линейным дифференциальным уравнением второго порядка вида:
![]() где а0, а1, а2, b –
постоянные коэффициенты.
где а0, а1, а2, b –
постоянные коэффициенты.
![]()
Схема набора для заданных исходных данных представлена на рис. 2.3.
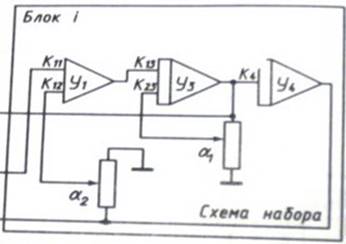
Рис. 2.3. Схема набора для заданных исходных данных.
где ![]()
![]()
![]()
3. Экспериментальная часть
3.1. Проверка адекватности объекта
Схема лабораторной установки для исследования объекта представлена на рис. 3.1.1.
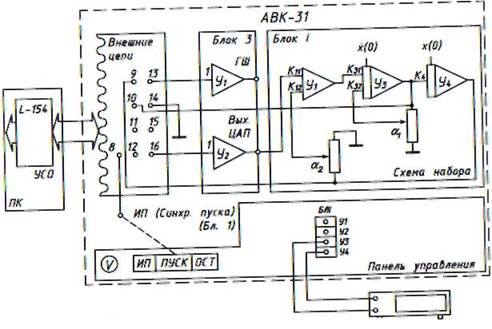
Рис. 3.1.1. Схема лабораторной установки.
Передаточная функция объекта управления:
![]()
![]()
Перед началом работы необходимо убедиться в адекватности объекта и определить параметры переходного процесса для него (время переходного процесса tпп).
Возмущение UС = 3 В.
Переходный процесс объекта представлен на рис. 3.1.2.
Рис. 3.1.2. Переходный процесс объекта.
Параметры переходного процесса для исследуемого объекта:
![]() сек
сек
3.2. Исследование управления в системе без запаздывания
Поставим оптимальные коэффициенты (Кп=1, Ки=0.5, КД=0.6), найденные по средством прошлой лабораторной работы и убедимся в правильности полученного значения времени переходного процесса. График представлен на рис. 3.2.
Действительно, коэффициенты оказались оптимальными и время переходного процесса равно 3.9 сек.
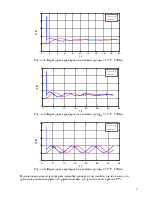
Рис. 3.5.4. Переходная характеристика системы при Кп = 1, Ки = 0.5, Кд = 0.6, xуст = 0.5 В,
N = 200, T = 100 мс.
3.3. Исследование управления в системе с запаздыванием по управлению
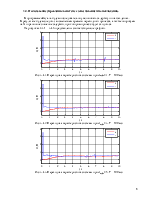
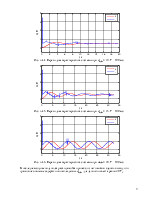
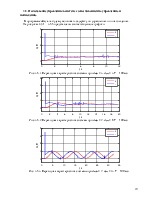
В программе delay.exe будем последовательно увеличивать задержку по управлению. В результате будем следить за изменением времени переходного процесса, а также попробуем найти граничное значение задержки, при котором процесс будет сходиться.
На рисунках 3.3.1 – 3.3.6 представлены соответствующие графики.
Рис. 3.3.1. Переходная характеристика системы при dупр = 1, T = 100 мс.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.