![]() Параметры k и
Т инерционного звена могут быть определены также по переходной характеристике,
полученной экспериментально. Из рис. 3 видно, что переходная характеристика
есть возрастающая экспонента. Постоянная времени Т определяется геометрически
как величина проекции касательной в начале экспоненты. Коэффициент усиления k
находится по ординате переходной характеристики при t ¥
Параметры k и
Т инерционного звена могут быть определены также по переходной характеристике,
полученной экспериментально. Из рис. 3 видно, что переходная характеристика
есть возрастающая экспонента. Постоянная времени Т определяется геометрически
как величина проекции касательной в начале экспоненты. Коэффициент усиления k
находится по ординате переходной характеристики при t ¥
![]() Постоянная
времени Т характеризует степень инерционности
звена, т.е. длительность переходного процесса, которая принимается
равной 3 Т.
Постоянная
времени Т характеризует степень инерционности
звена, т.е. длительность переходного процесса, которая принимается
равной 3 Т.
1.3. Интегрирующее звено.
Уравнение звена
dy
= kx, (39)
dt или в интегральной форме
 |
т.е. выходная величина пропорциональна интегралу от входной величины по времени .
Передаточная функция И ККУ звена
К(р) = k/p; K(jw) = k/(jw). (21)
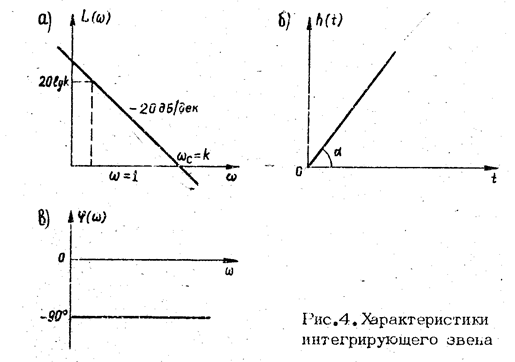
ЛАХ интегрирующего звена
L(w) = 20 lg k – 20 lg w (22)
имеет вид прямой с наклоном - 20 дБ/дек.
ЛФХ эвена ф(w) = -900 . (23)
Переходная фикция
h(t) = kt . (24)
Частотные и переходная характеристики интегрирующего звена приведены на рис, 4. График L(w) пересекает ось абсцисс при частоте среза wc = k.Переходная характеристика есть прямая линия с наклоном к = arctgk.
![]()
1.4. Дифференцирующее звено.
Идеальное дифференцирующее звено дает на выходе величину, пропорциональную производной от входной величины . Уравнение его
![]() dx
dx
![]() y = k .
(25)
y = k .
(25)
dt
Передаточная функция и ККУ звена
К(р)=kp;K(jw)=jwk. (26)
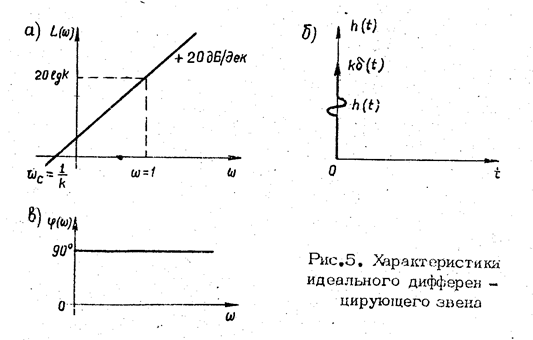
ЛАХ дифференцирующего звена
L(w) = 20 lg k + 20 lg w (27)
имеет вид прямой с наклоном +20 дБ/дек. Частота среза
wc = 1/k.
ЛФХ звена ф(w) = 900 . (28)
Переходная функция
h(t)=kd(t), (29)
где d(t) - дельта-функция.
График переходной функции имеет вид мгновенного импульса с амплитудой, равной бесконечности.
На рис. 5 приведены частотные и переходная характеристики идеального дифференцирующего звена.
Идеальное дифференцирующее звено практически не может быть реализовано. Реальные дифференцирующие звенья всегда имеют малые параметры, создающие инерционность. Реальное дифференцирующее звено описывается уравнением
dy dx
![]()
![]() T + y = k
. (30)
T + y = k
. (30)
dt dt
Передаточная функция и ККУ звена
kp jwk
![]()
![]() K(p) = ;
K(jw) = . (31)
K(p) = ;
K(jw) = . (31)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.