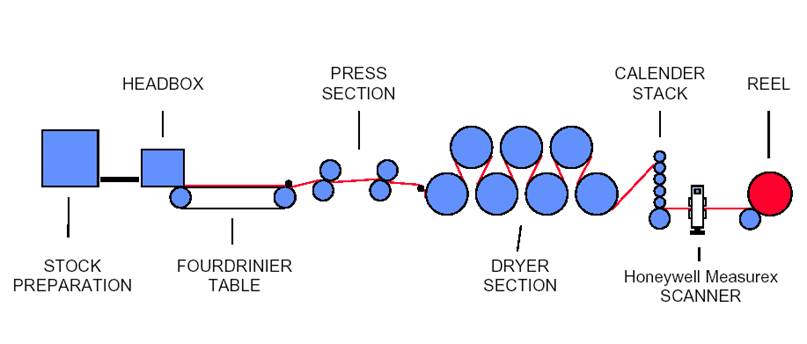
Скоростные размеры использованы для машинной установки и промышленной информации. Обычно они взяты в fourdrinier таблице (приводная скорость) и в секции сушилки или бобины (машинная скорость).
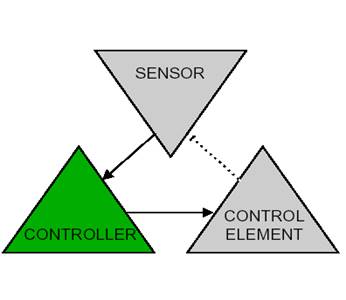
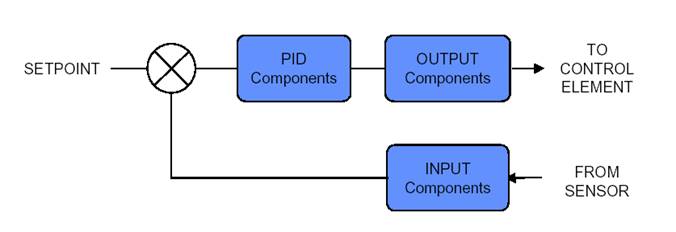
Цель контроллера :
обработать входной сигнал из сенсора и сравнить желаемую величину процесса с входным сигналом из сенсора и действовать ,так чтобы уменьшать ошибку и выдовать фактическую величину по отношению к желаемой величине
Все системы управления с обратной связи имеют компаратор и контроллер.
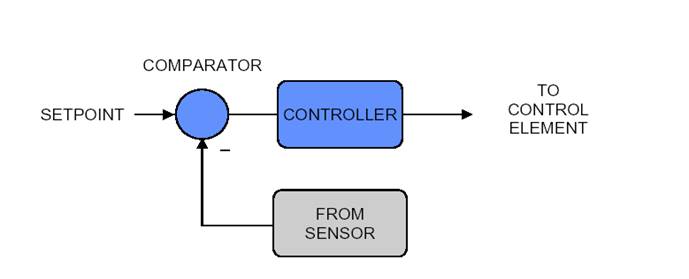
Компаратор сравнивает входной и сенсорный сигнал. Сигнал ошибки, который - выходит из компаратора, становится входной обратной связью для контроллера . Основанный на сигнале ошибки из компаратора, контроллер вычисляет сигнал в конечный элемент. Математическая функция выполненная в контроллере определена динамикой процесса.
Сегодняшние современные контроллеры используют пропорциональный, интегральный, и дифферинциальные (PID) функции .
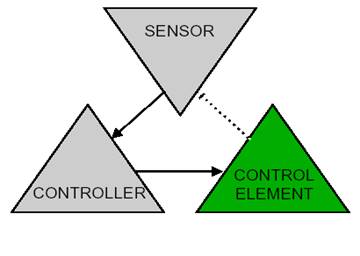
Выход из контроллера является сигналом в конечный управляющий элемент, который изменяет управление манипулирующей переменной.
Во многих системах управления процессом, конечным элементом управления является клапан, который обычно проведен приводом. Привод перемещает основу управляющего клапана, чтобы открывать или закрывать клапан. Управляющие приводы клапана могут быть пневматическими, электрическими, гидравлическими, или ручными.
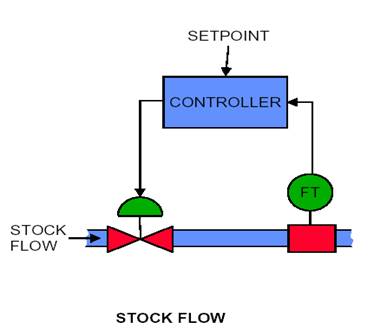
Сумма акции установленной в проводе определяет базисный вес готового листа. Например; если лист был слишком светлым, оператор должен увеличивать setpoint фондового контроллера . Это действие должно заставлять фондовый клапан потока, открываться, устанавливая более высокую акцию в проводе и увеличивать листовой вес.
Согласованность акции является также содействующим показателем в базисном весе готового листа.
Так как согласованность увеличивается, то лист получится тяжелый. Попытки, поддерживать согласованность на желаемом уровне сделаны установкой суммы воды разбавления добавленного к системе.
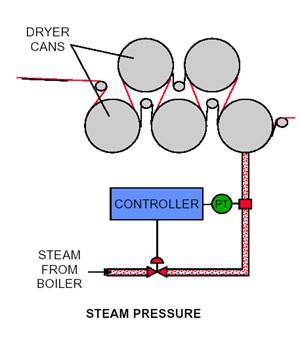
Количество пара в цилиндрах сушки- определяет влажность готового листа. Например; если лист был слишком мокрым оператор должен увеличивать setpoint контроллера давления пара. Это действие должно заставлять клапан пара, открывать, устанавливая более высокий пар в цилиндрах сушки -, который должен сушить лист.
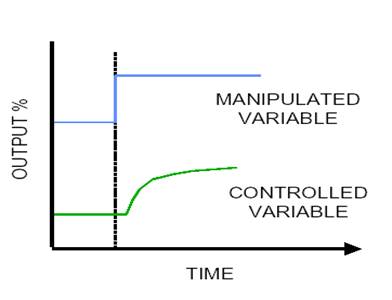
Все процессы показывают некоторую форму динамического поведения. Чтобы изучать это поведение, полезно просмотреть как процесс реагирует на изменение шага в манипулирующей переменной.
Для Da Vinci, Система DCS использована всякий раз, когда outputting в конечный управляющий элемент (напр клапан). Эти системы имеют много выборов и могут выполнять много функций. Общий контроллер является Пропорциональной Интегральной Дифферинц. (PID) контроллером. Это осуществлено в большинстве системах DCS и как простые контроллеры цикла.
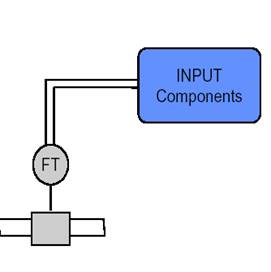
Цель вклада контроллера цикла PID в том, чтобы преобразовывать вклады процесса на прикладные устройства.
4 - 20 ma Текущих сигналов из области передатчика подключены к входным терминалам.
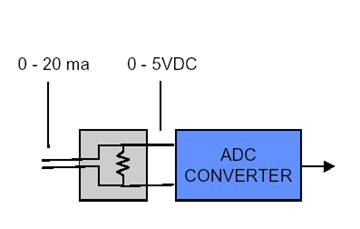
Много контроллеров используют цифровые электронные компоненты. Чтобы обрабатывать информацию из области передатчика , сигнал из передатчика должен быть преобразован.
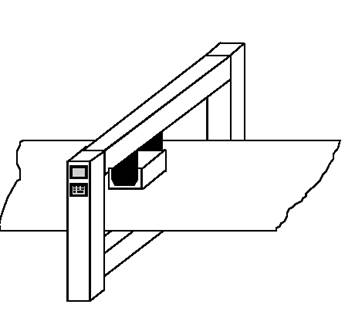
Многие каскадные элементы управления использованные на бумажных фабриках доверяются во вклады из сканеров Honeywell Measurex. Размеры предусмотренные этими сканерами включают много листовые характеристики как например,: базисный вес (масса), влажность , кронциркуль, цвет, зольность, гладкость, и непрозрачность.
Размеры из сканирующих сенсоров обеспечивают точные данные "в реальном времени", которые могут быть использованы, чтобы регулировать машинную операцию.
Результат- улучшенная машинная эффективность и более высокое качество продукта.
зольность / Минерал. измерения
Высокий сигнал-tono se я настроил Рентгеновские лучи.
источник трубки 
Без контактный.
Использует вкладам из Базисного Веса и измерителей Влажности . Компенсация- ошибки окружающей среды.
- Воздушная Температура
- Z-axis Изменения
- Dirt Buildup
-Быстрый Ответ Измерения
- Высокое Измерение Профиля Резолюции CD
- Высокое Измерение Направления Резолюции MD
-Быстрое Измерение Профиля
- Высокий Частотный Анализ Процесса & Качества

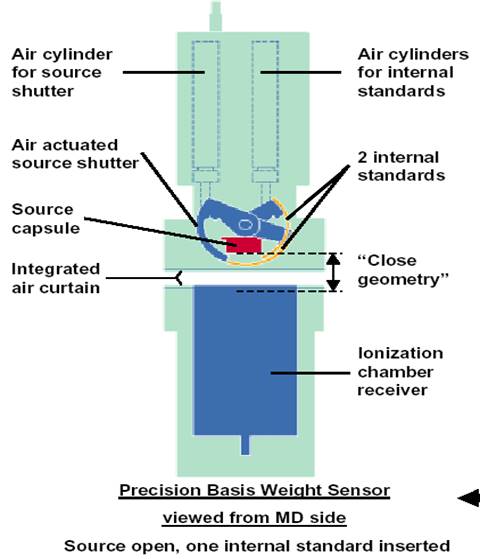
-Базисный Вес HMX и сенсоры Зольности используют источники излучения- ионизации.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.